Case 21
Motorcycle Robot
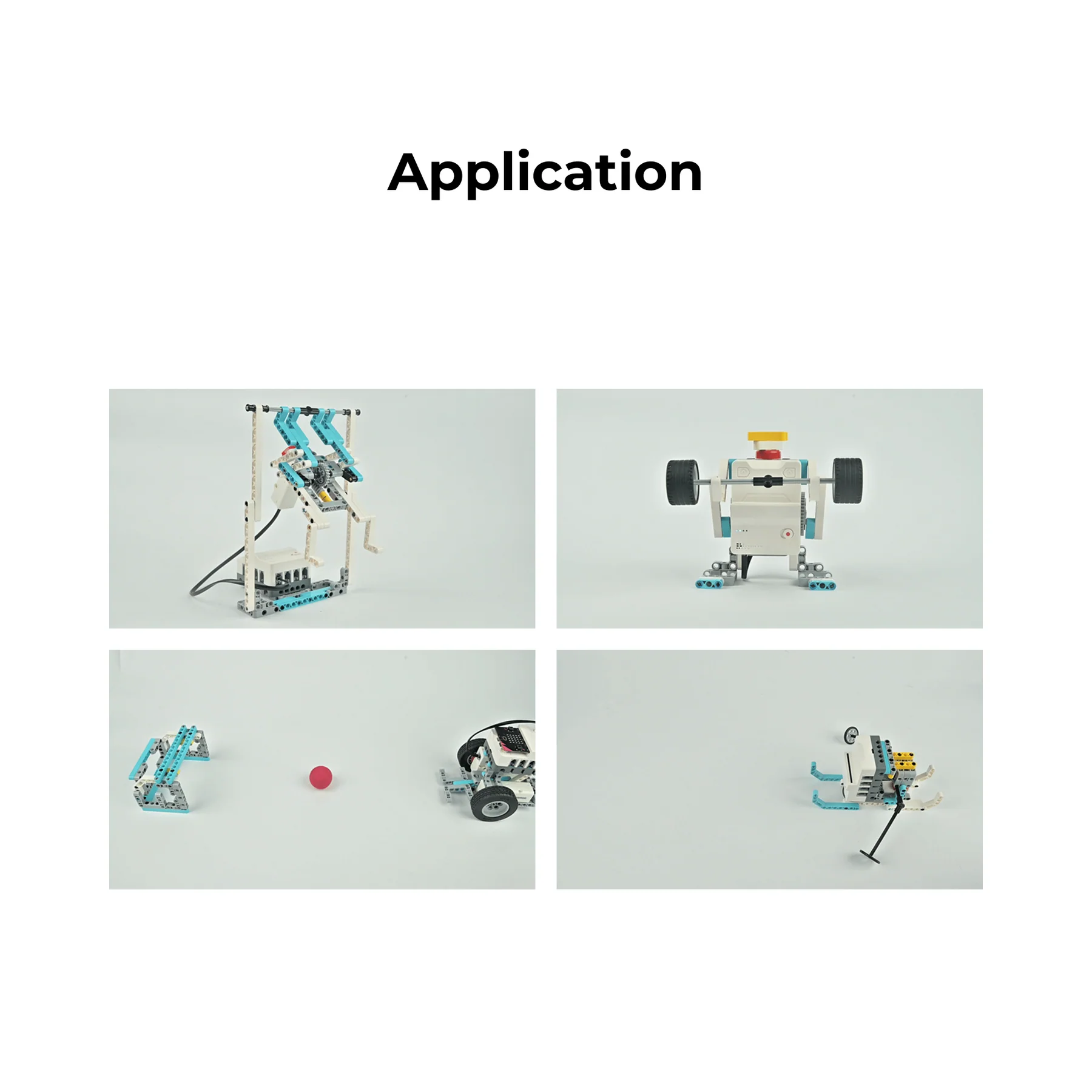
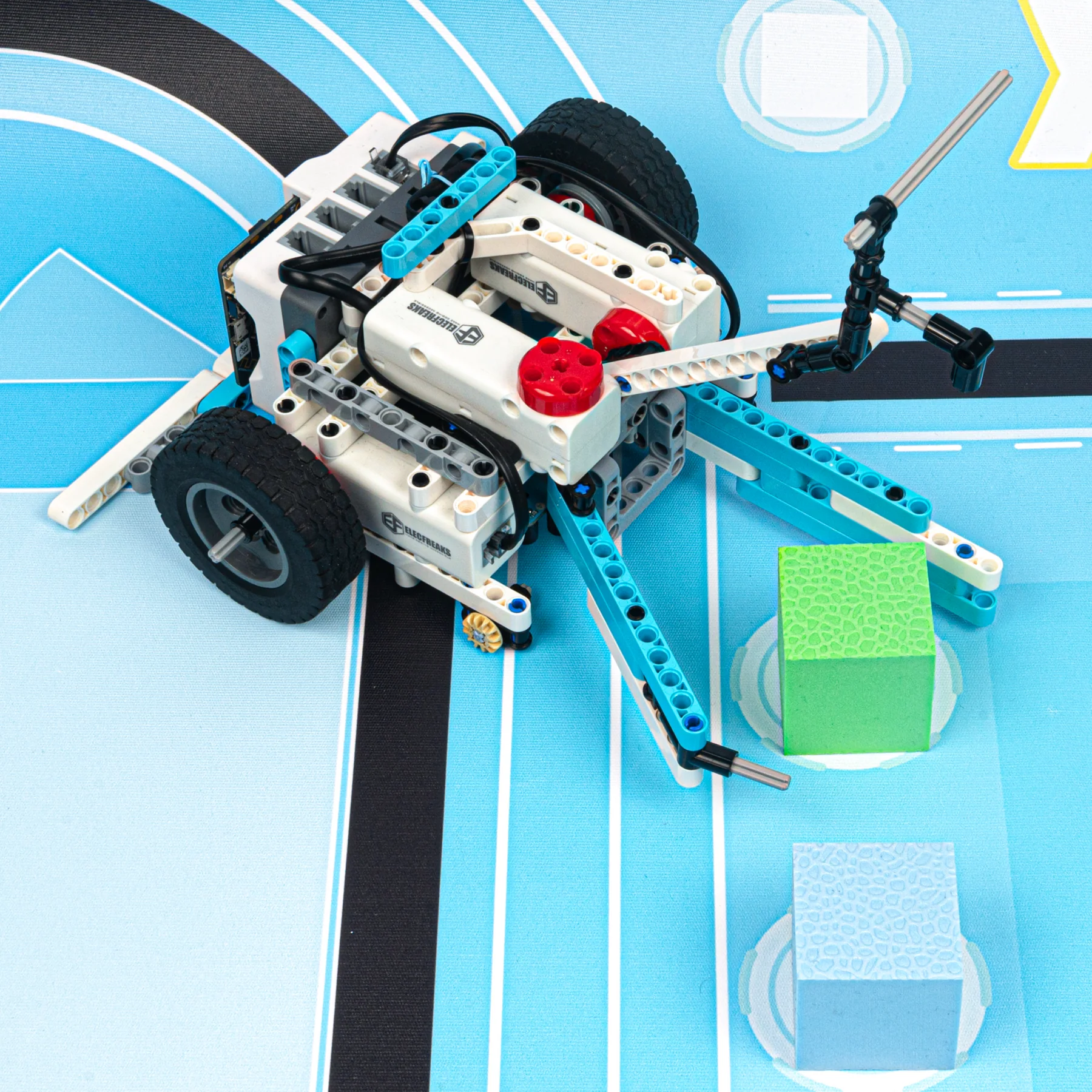
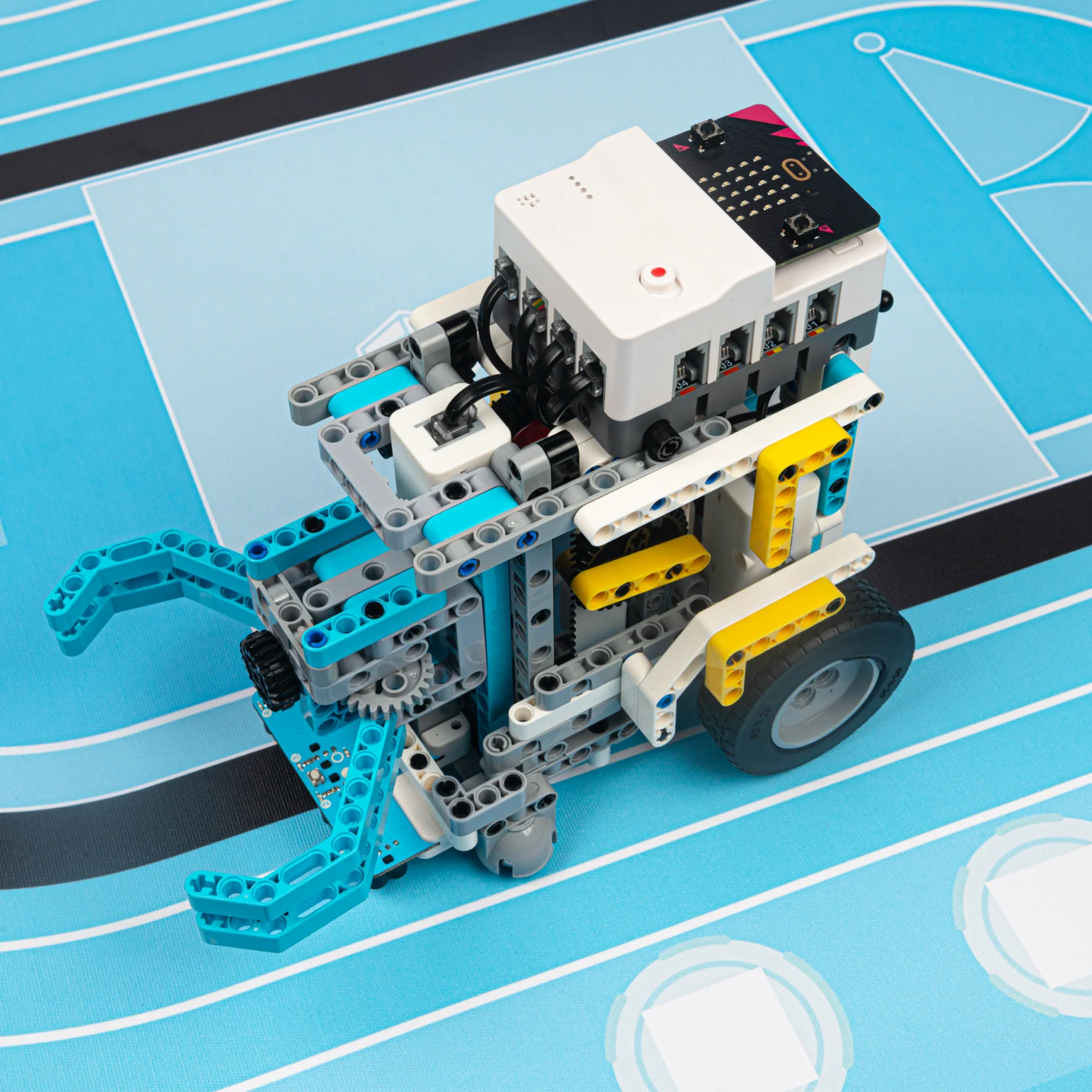
Case Introduction
Build a two-wheeled motorcycle robot featuring rear-wheel motor drive and front-wheel steering. Program motor speed and servo angle control to achieve movement, steering, and speed regulation. Press button A to move forward; button B to stop.
Course Introduction
Students learn to equip systems with intelligent control, enabling automated response to events and data tracking without manual intervention — focusing on sports while technology manages the operations. This case integrates physics, engineering, and programming knowledge comprehensively.
Teaching Objectives
- Master motorcycle movement mechanics: rear-wheel drive + front-wheel steering
- Learn PWM motor speed adjustment and servo angle programming
- Understand control workflow: input → processing → actuator response
- Apply conditional statements for motion control
Learning Exploration
Investigate relationships between motor speed and driving velocity, analyse how servo steering angles affect turning radius, and explore wheelbase adjustments for improved stability.