Case 12
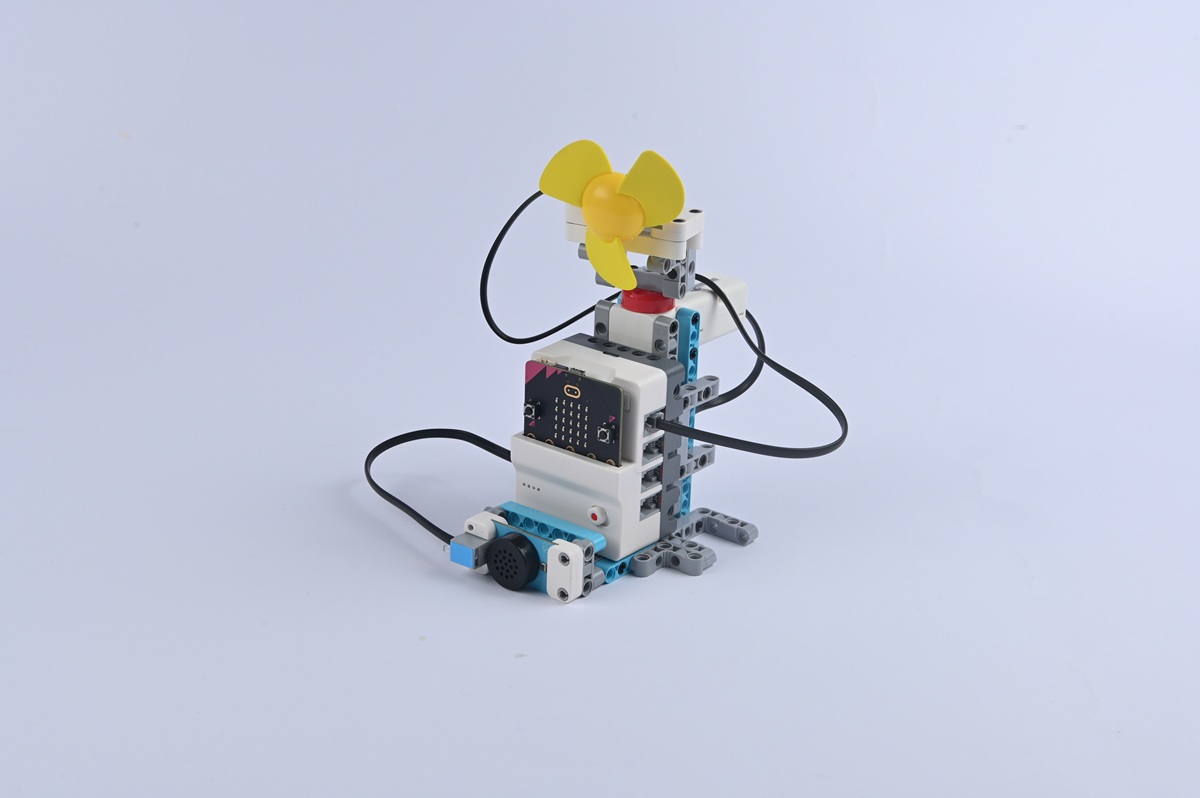
Voice-Controlled Fan
Case Introduction
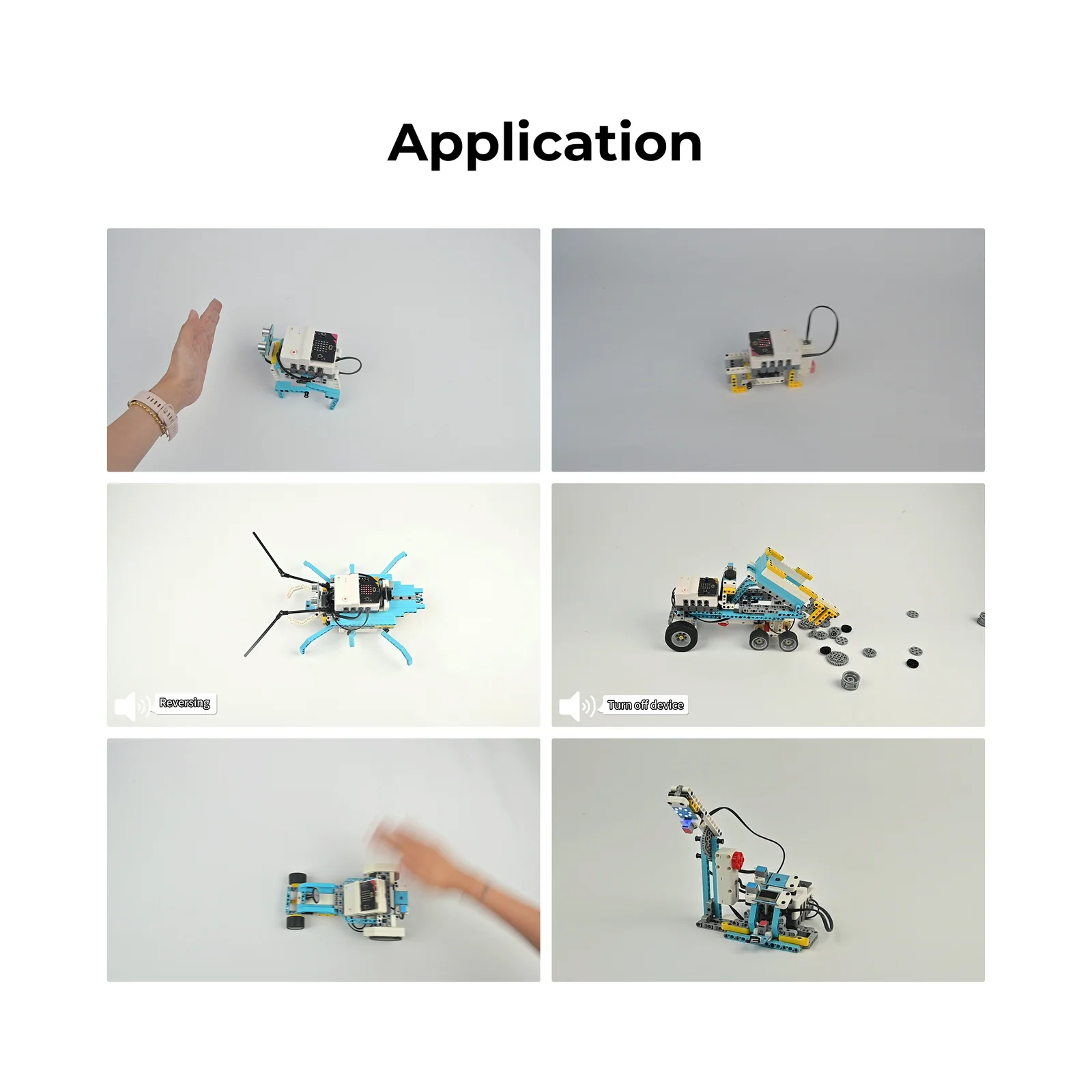
Create a fan system that responds to spoken commands for power, speed adjustment, and oscillation control. Six voice commands: "Start device", "Turn off device", "Raise a level", "Lower a level", "Keep going" (oscillation), "Pause".
Story Introduction
A team returns with energy crystals in intense heat and encounters a malfunctioning "Fengyu (Wind Talk) Fan." Despite verbal commands, the device fails to respond due to loose wiring in the voice module — "cotton stuffed in one's ears" preventing command reception.
Teaching Objectives
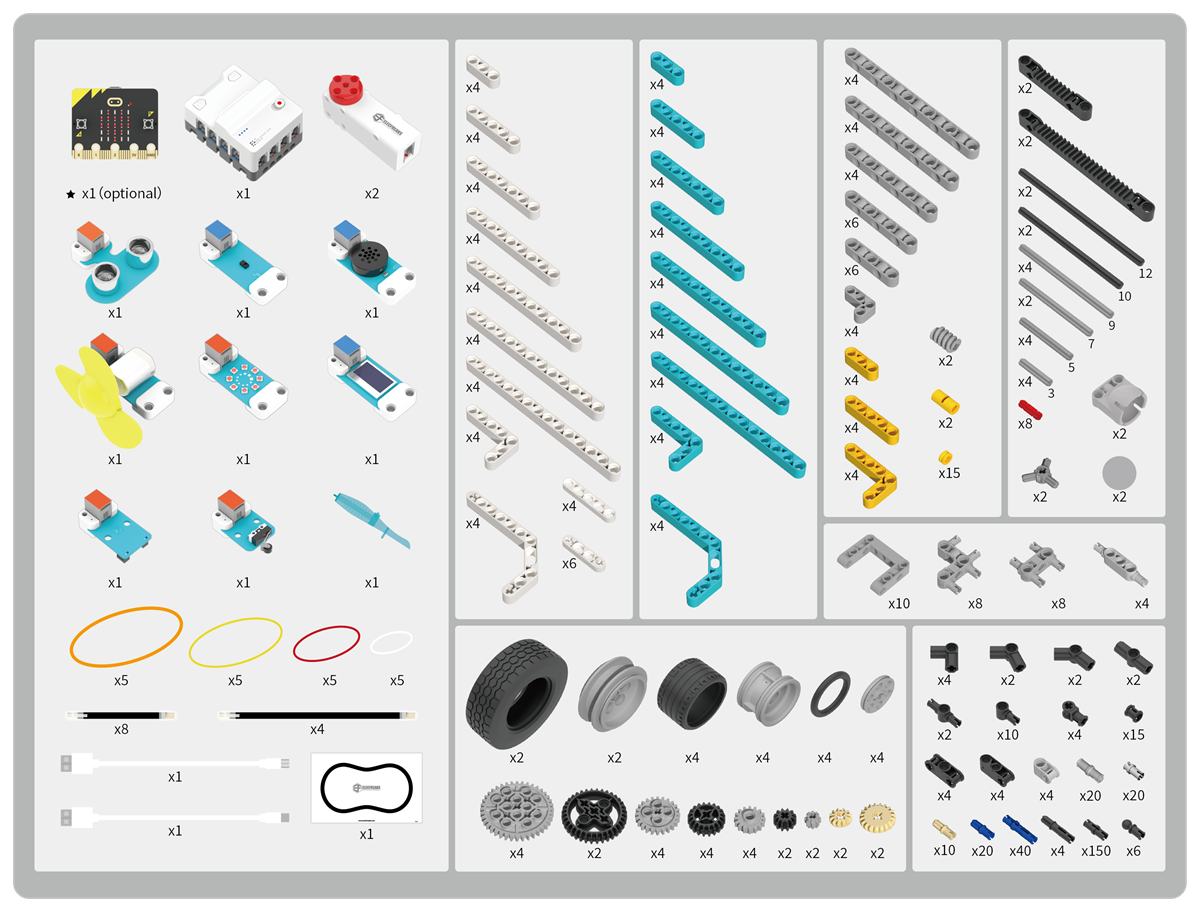
- Master assembly and connection techniques for fan modules, oscillation mechanisms, and voice sensors
- Understand voice sensor command parsing and establish correlations between vocal inputs and device responses
- Develop troubleshooting skills by debugging voice sensitivity and fan parameters
- Explore smart home technology applications and recognise how voice interaction enhances daily convenience
Learning Exploration
What are optimal acoustic environments for accurate voice recognition? How can you develop multiple command sets and prevent command confusion? Compare voice-controlled, button-operated, and remote-controlled fans.
Case Demonstration