ElecFreaks · micro:bit Smart Car Series
Smart Car & Autonomous Driving
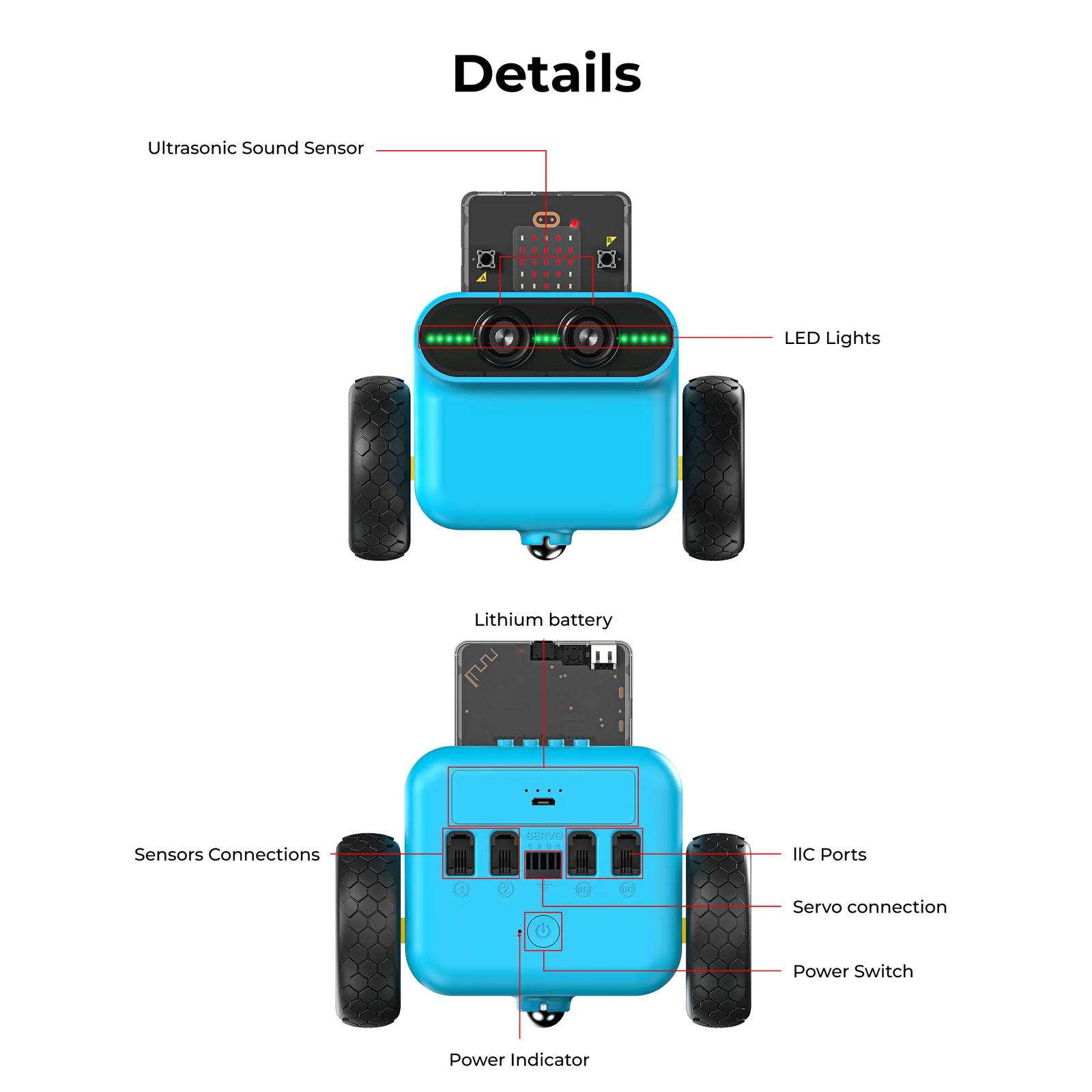
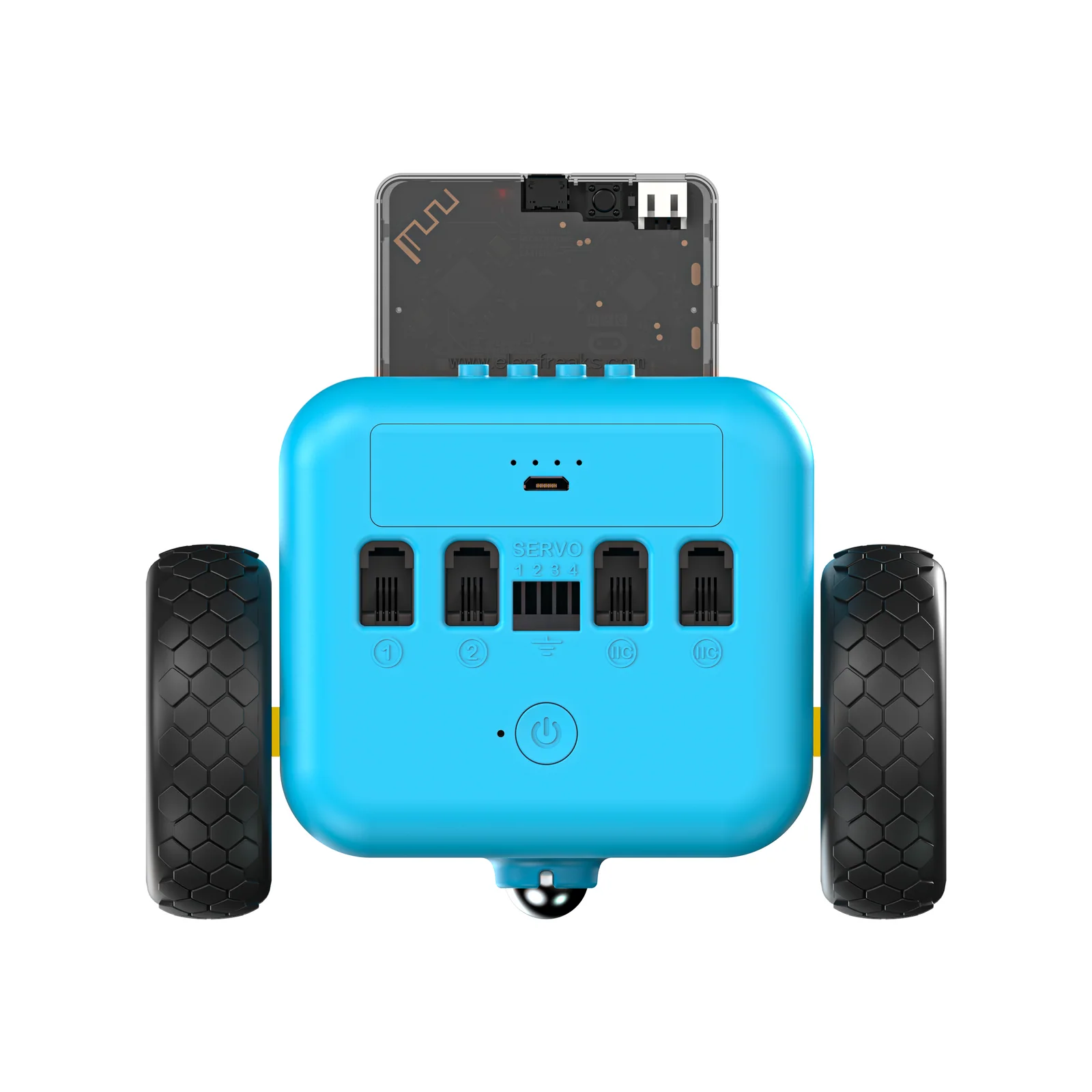
TPBot Edu Car Kit
An intelligent programmable car built for K–12 STEAM education. Featuring an encoded motor, onboard gyroscope, rechargeable battery, and RJ11 sensor expansion — students explore real autonomous driving concepts through hands-on programming.
🚗 12 Guided Projects
🤖 Encoded Motor + Gyroscope
🔌 RJ11 Sensor Expansion
🎓 Grades 4–8
Request a Quote →
12
Projects
360°
Gyroscope
70min
Charge Time