Elecfreaks · micro:bit Smart Car Series
Smart Car & Autonomous Driving
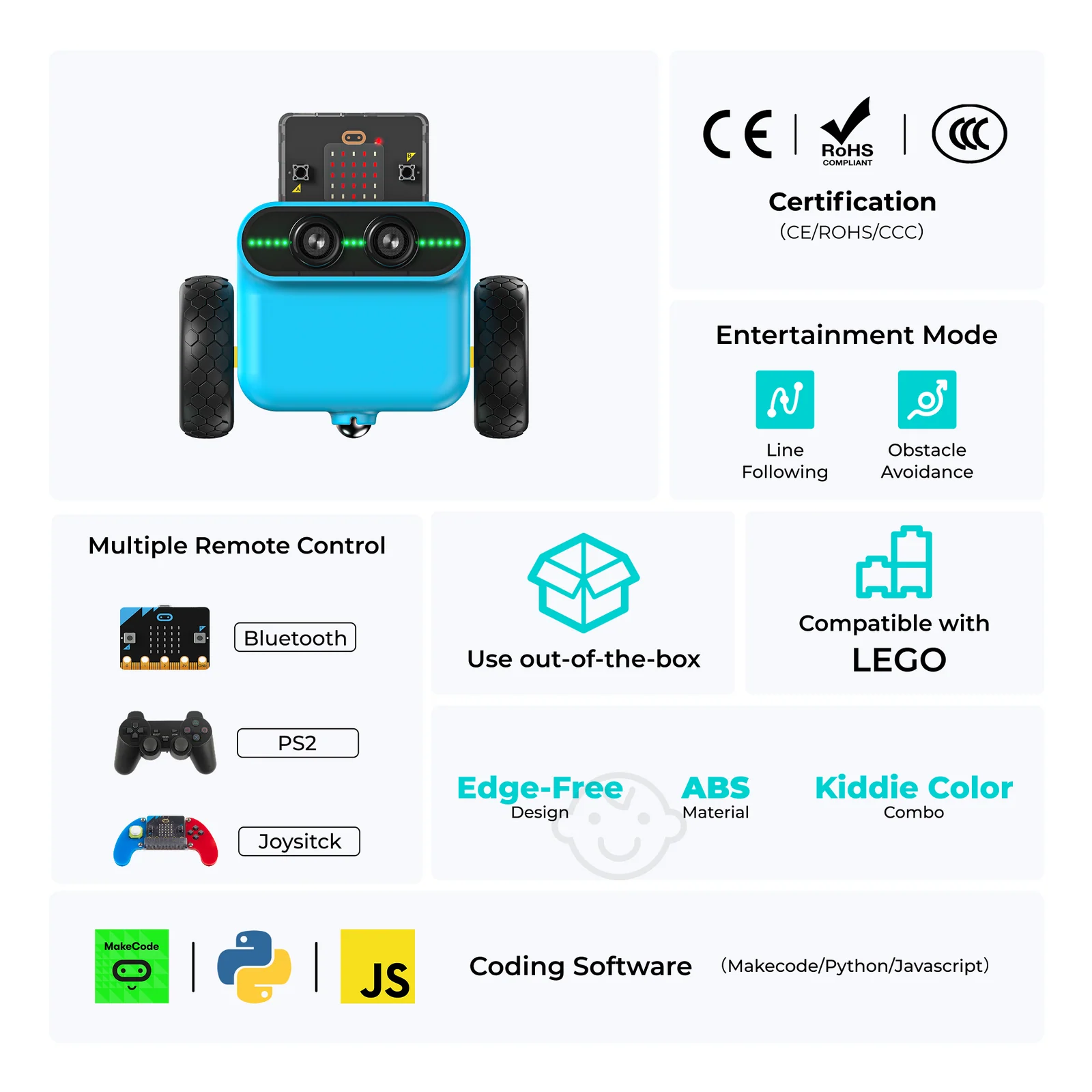
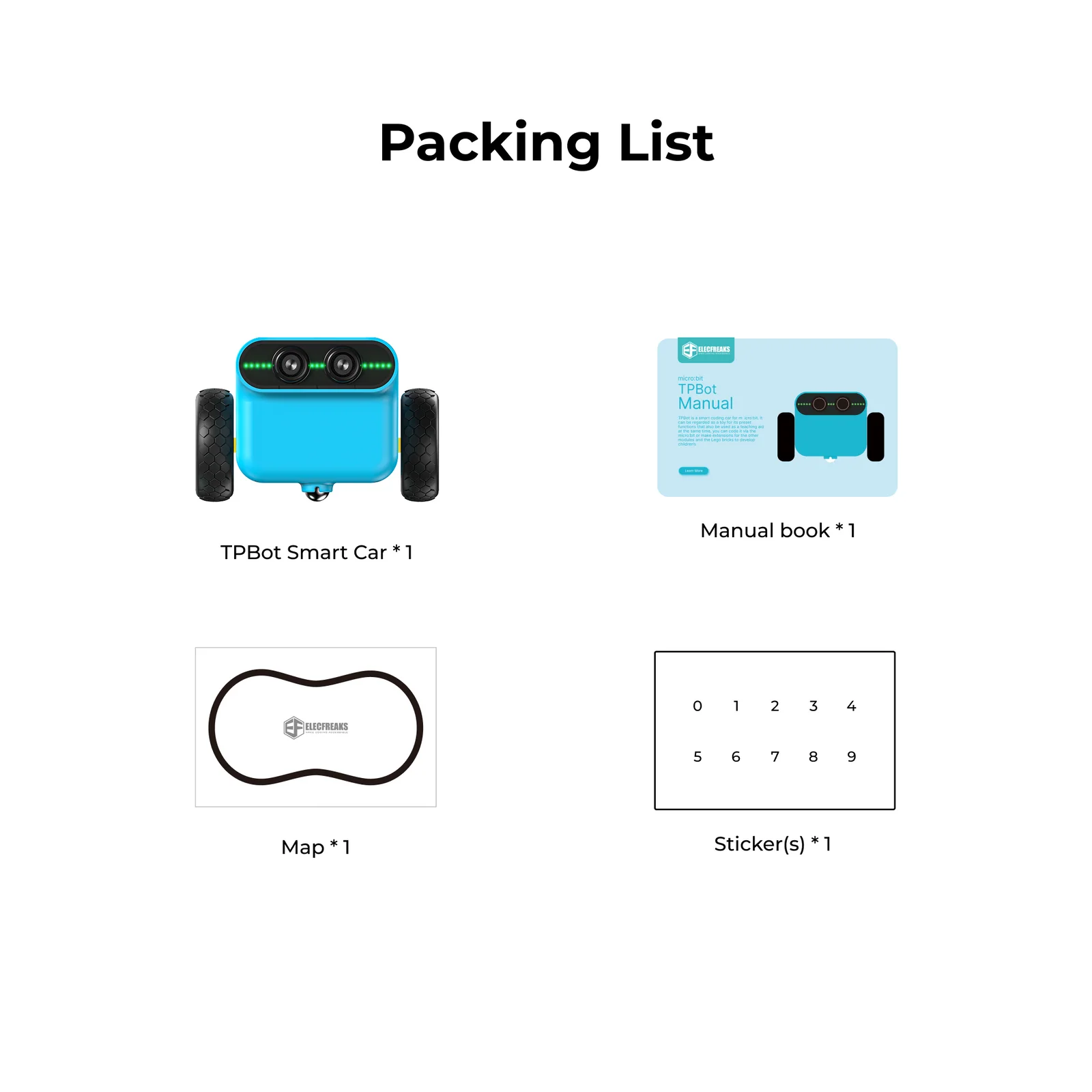
TPBot Car Kit
A smart coding car for micro:bit that works both as a standalone toy and a powerful classroom teaching aid. Featuring preset line-tracking and obstacle-avoidance modes, RGB LED headlights, servo expansion ports, and full LEGO brick compatibility — students move from play to programming in minutes.
🚗 14 Guided Cases
⚡ Works Without micro:bit
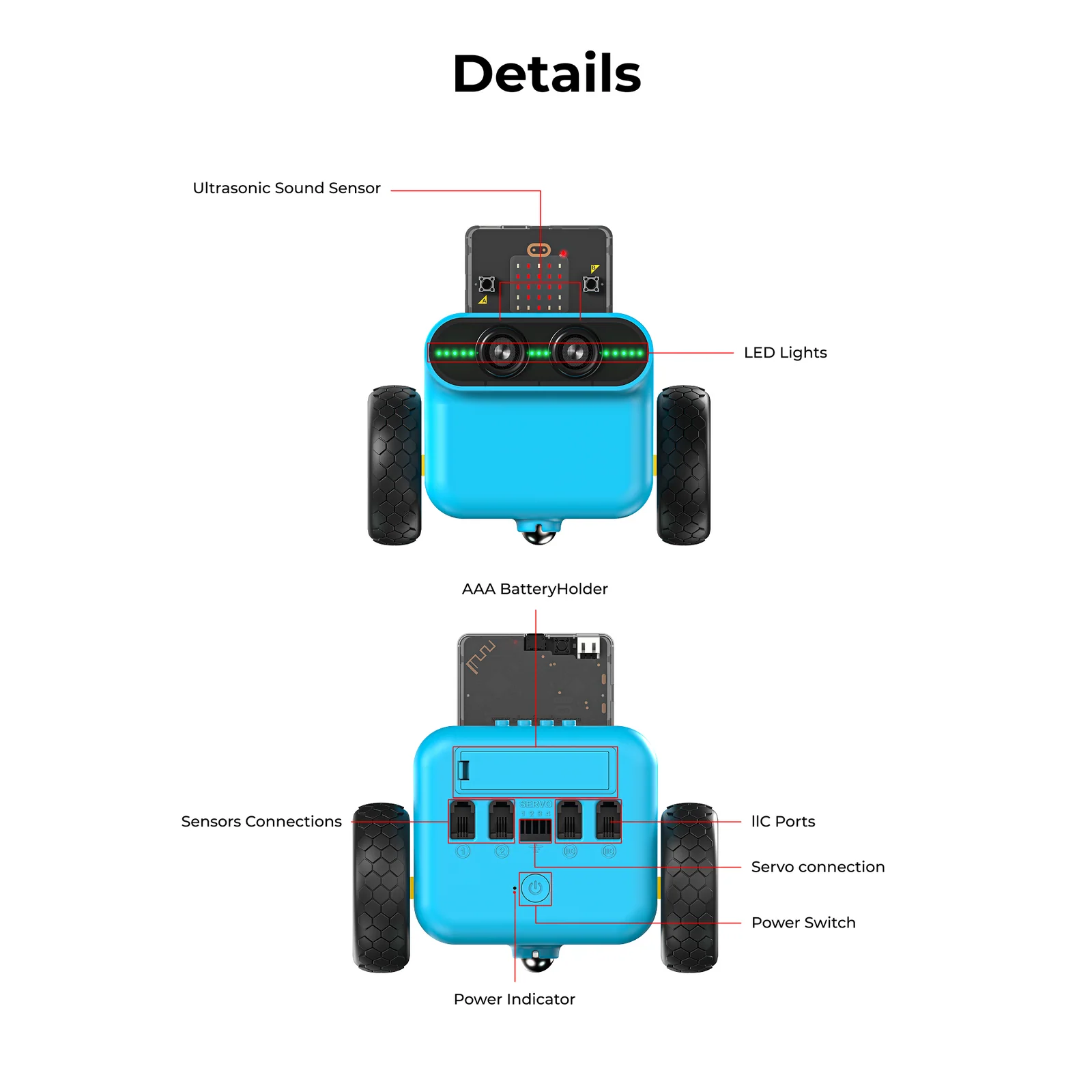
💡 RGB LED Headlights
🎓 Grades 3–8
Request a Quote →
14
Cases
2
Auto Modes
LEGO
Compatible