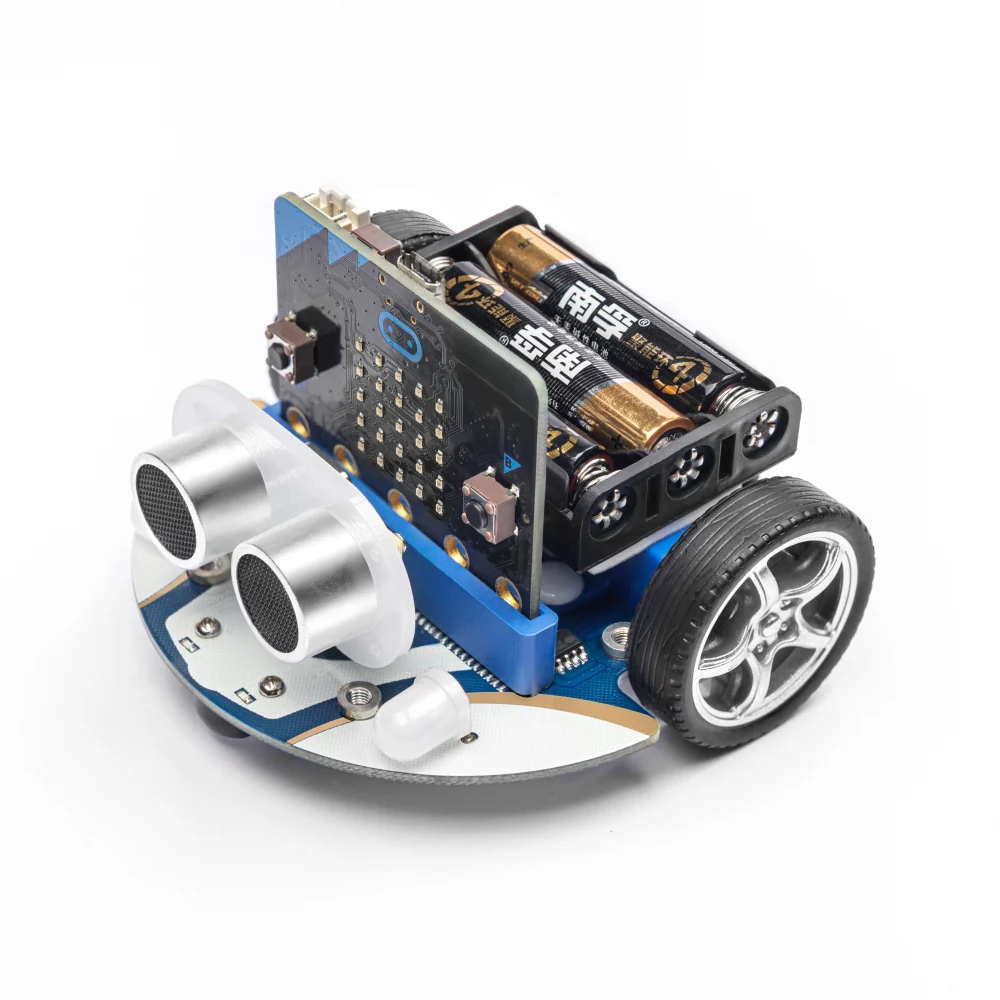
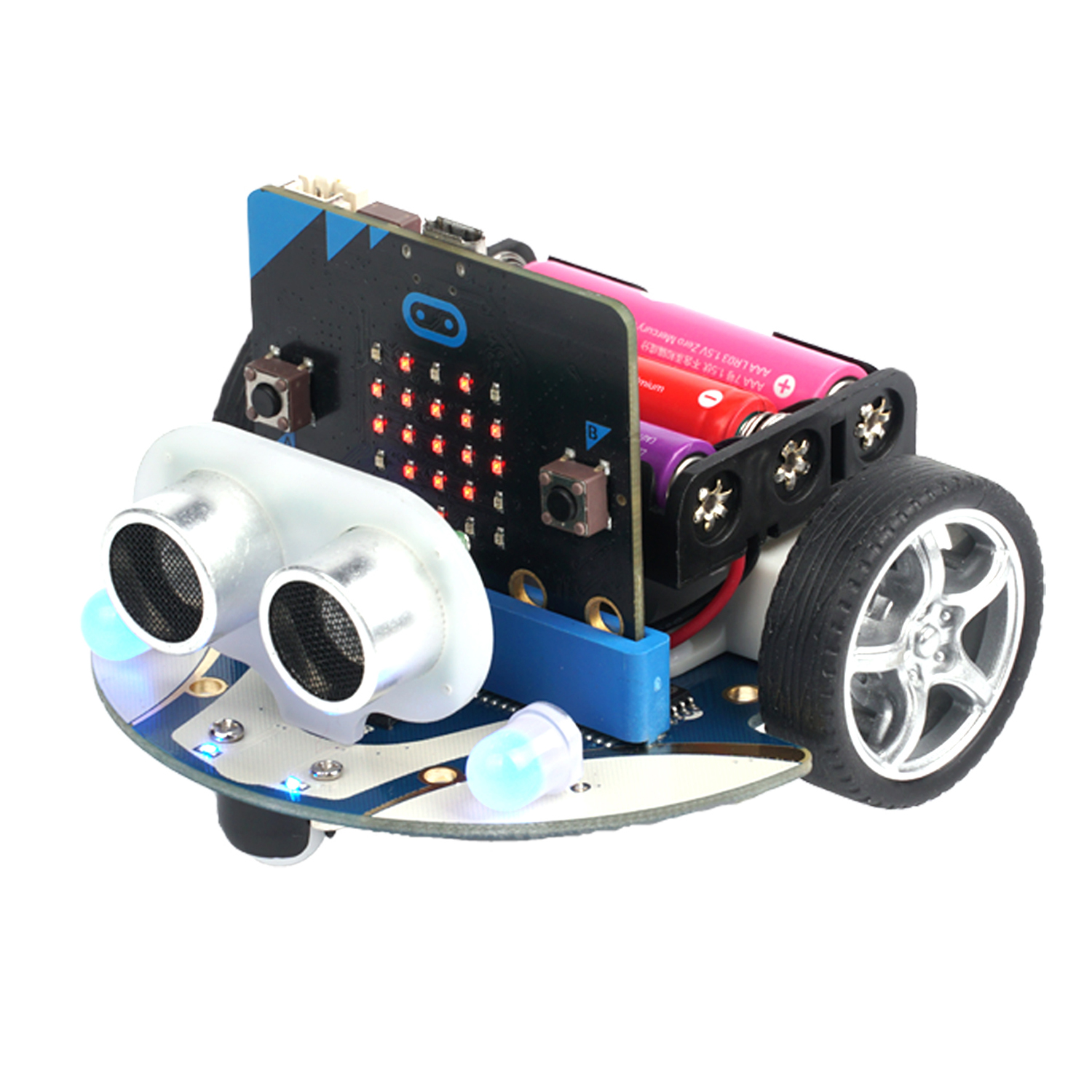
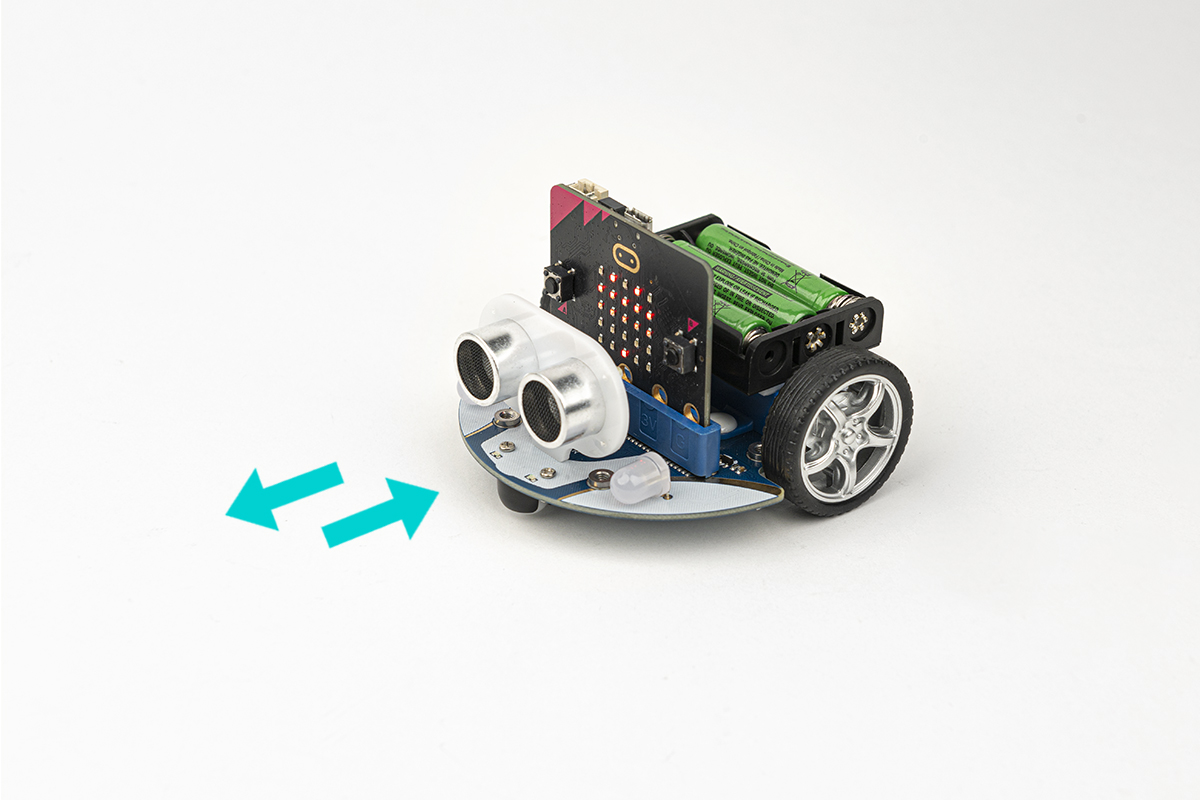
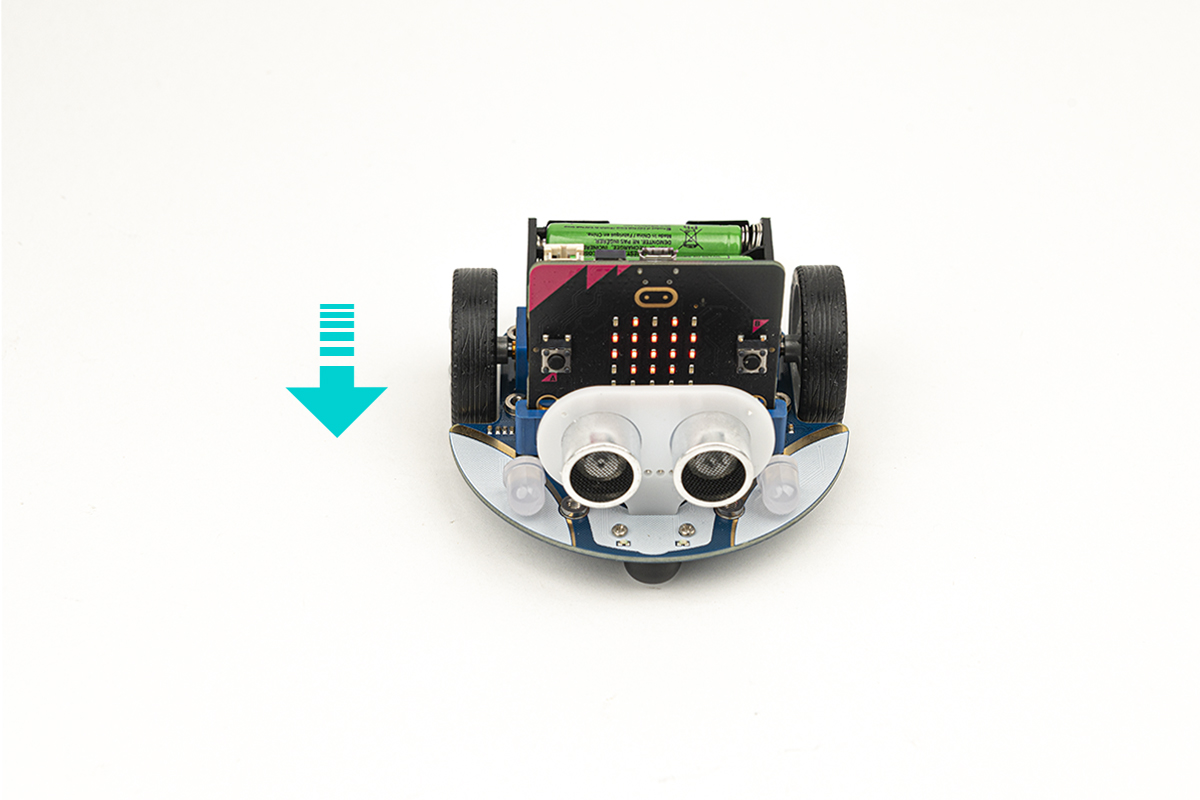
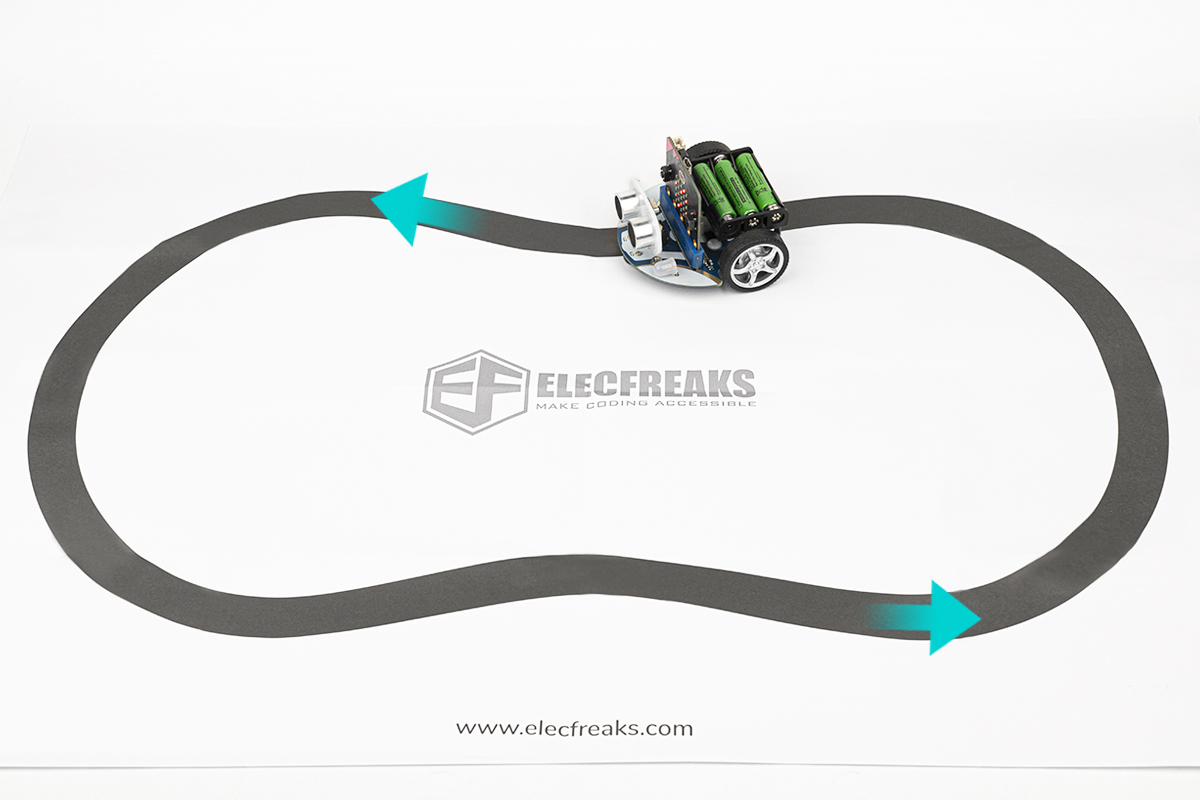
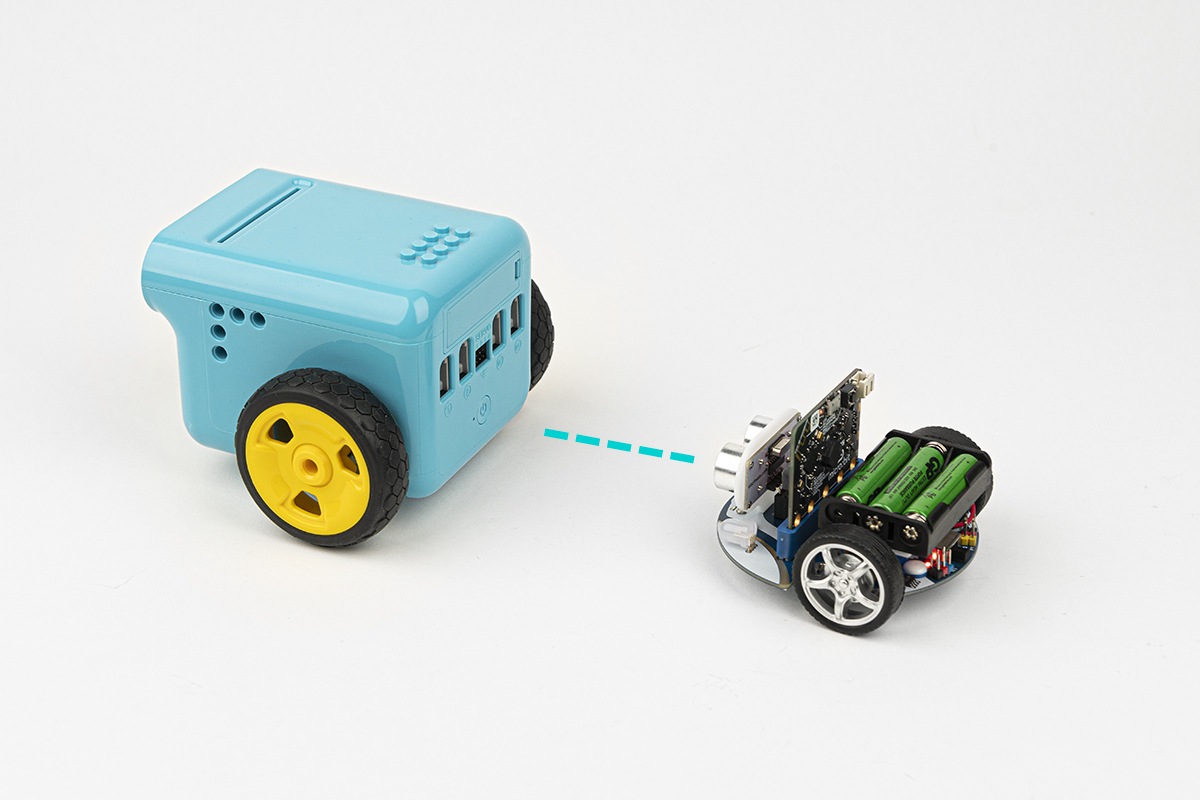
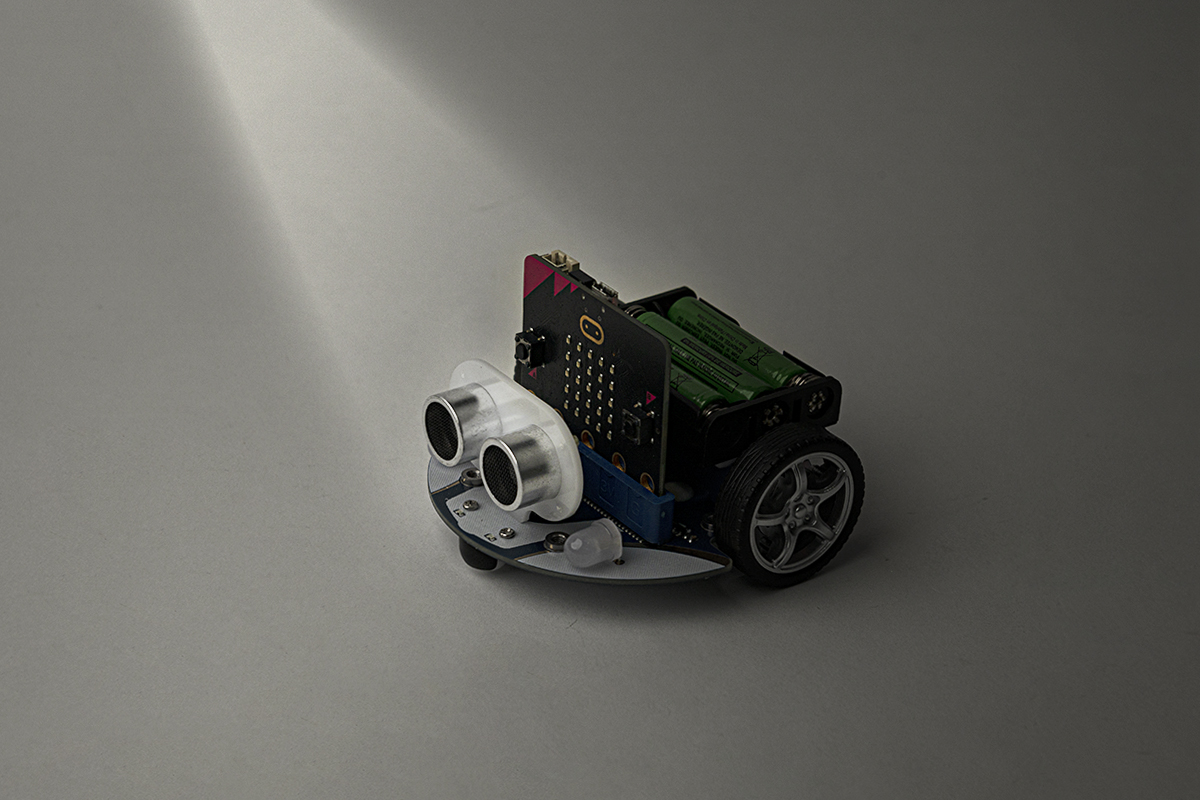
The ELECFREAKS Smart Cutebot is a rear-drive smart car driven by dual high-speed GA12-N20 DC micro gear motors. Its compact, arc-shaped design is crash-resistant and aesthetically distinctive — making it ideal for classroom robotics and STEAM education.
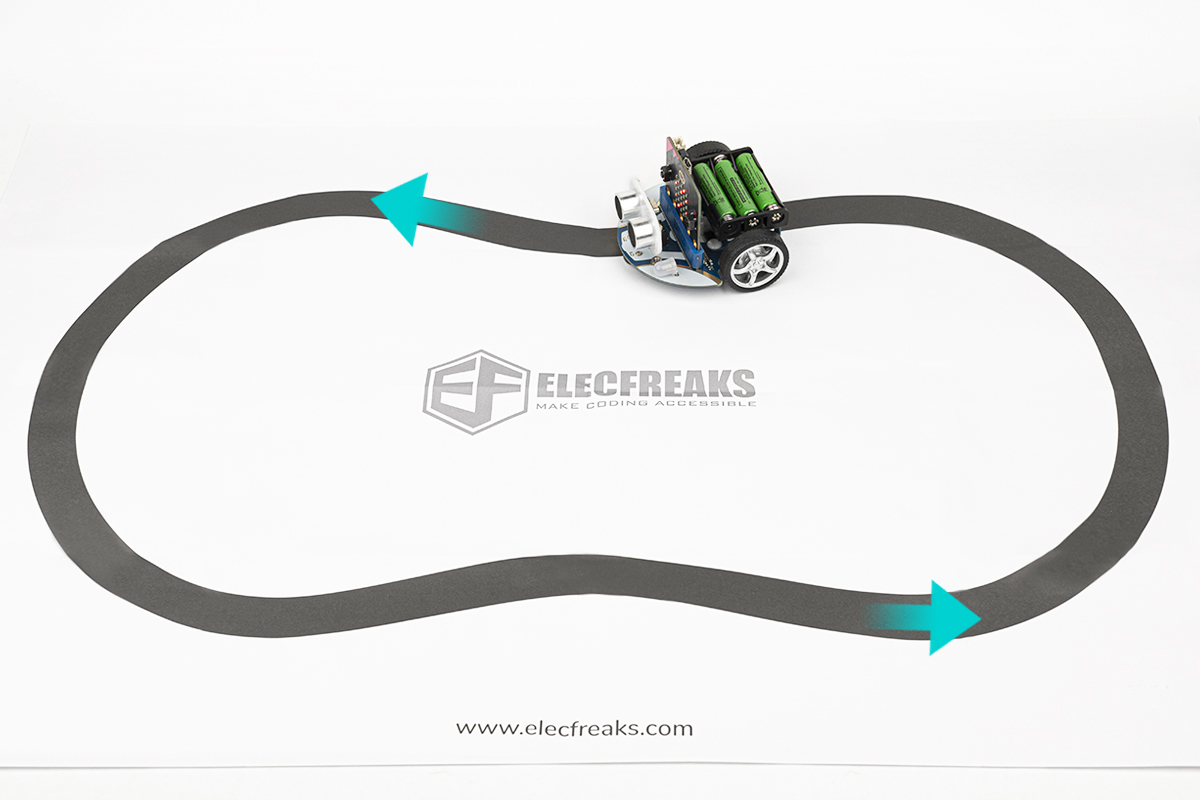
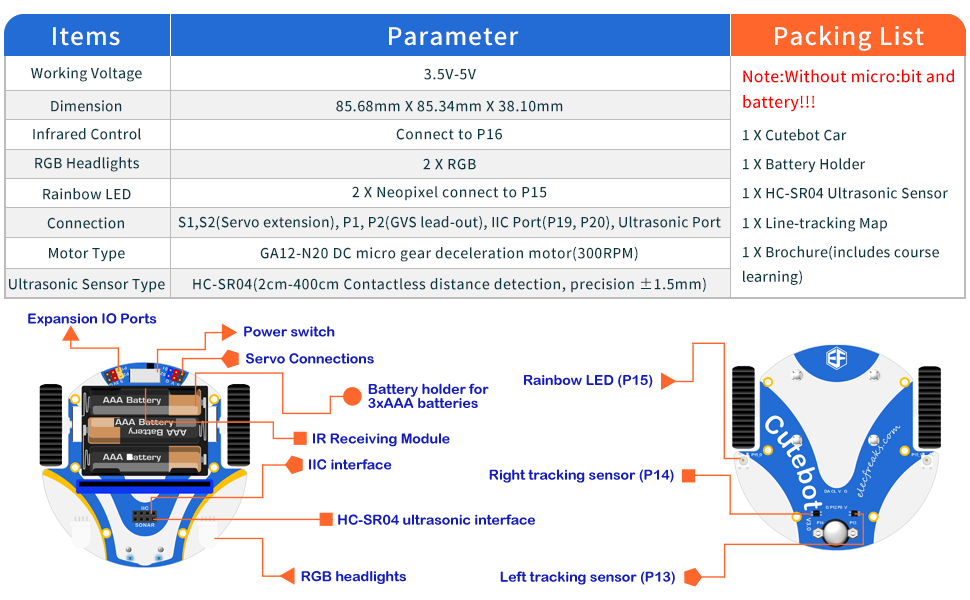
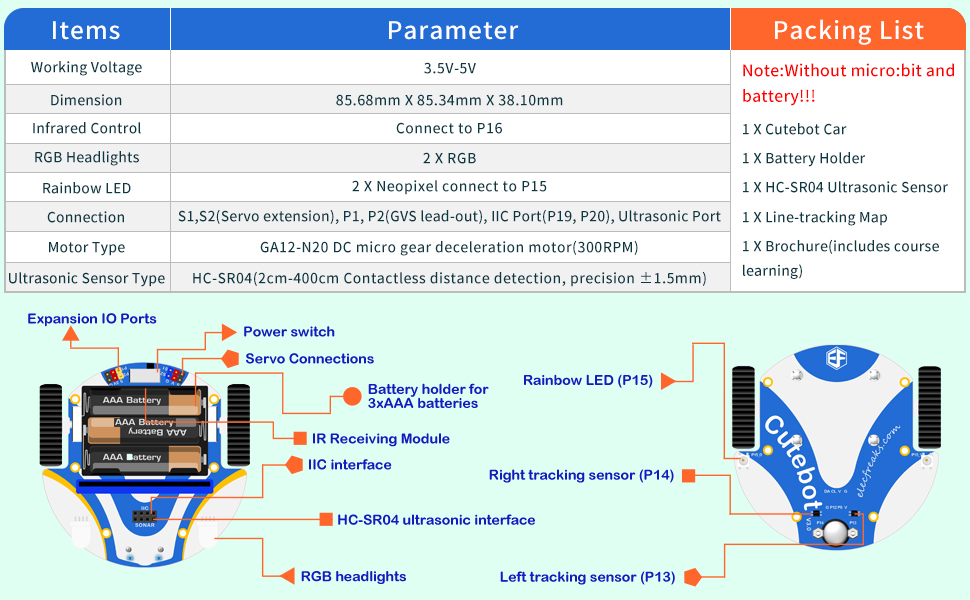
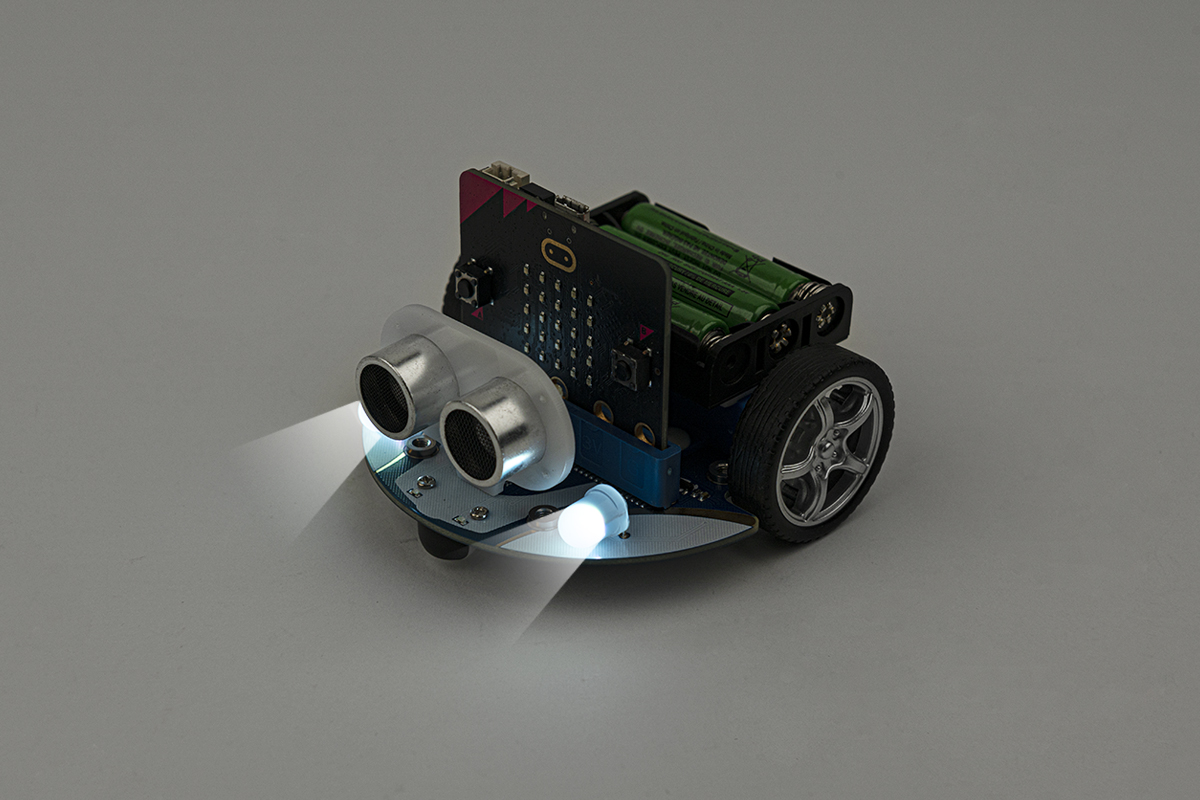
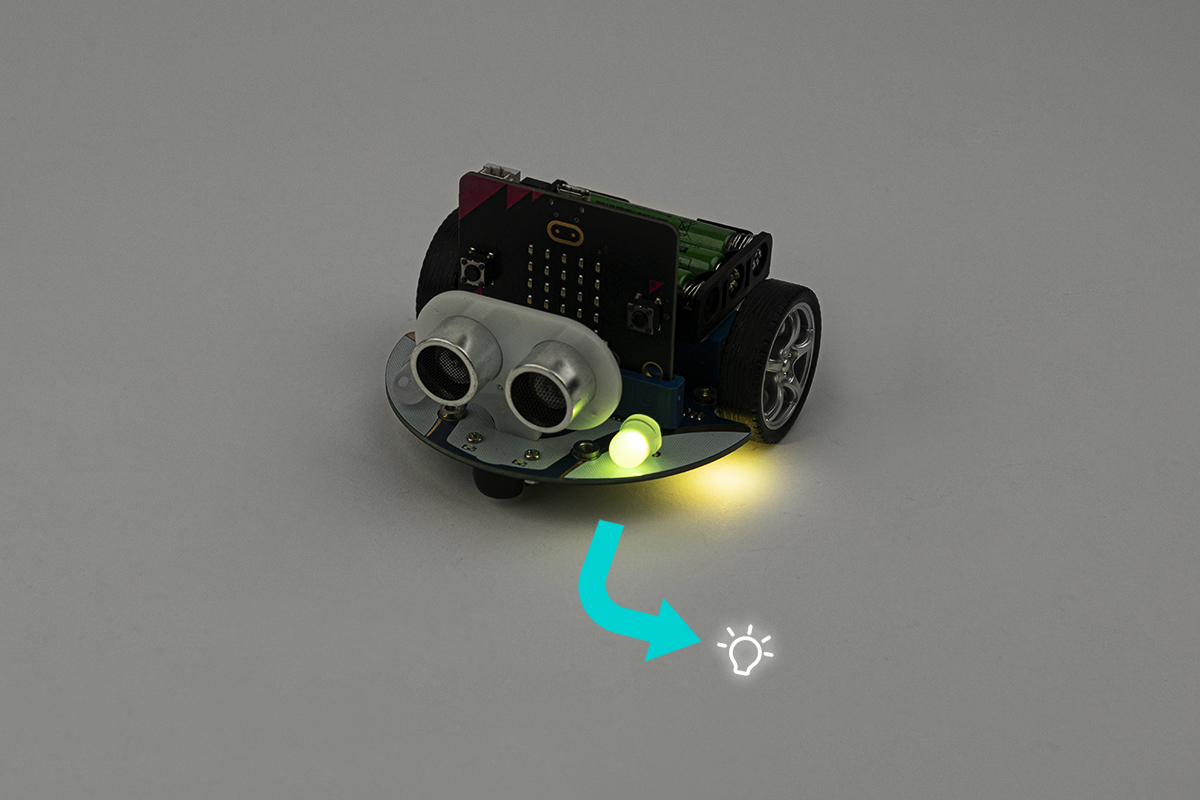
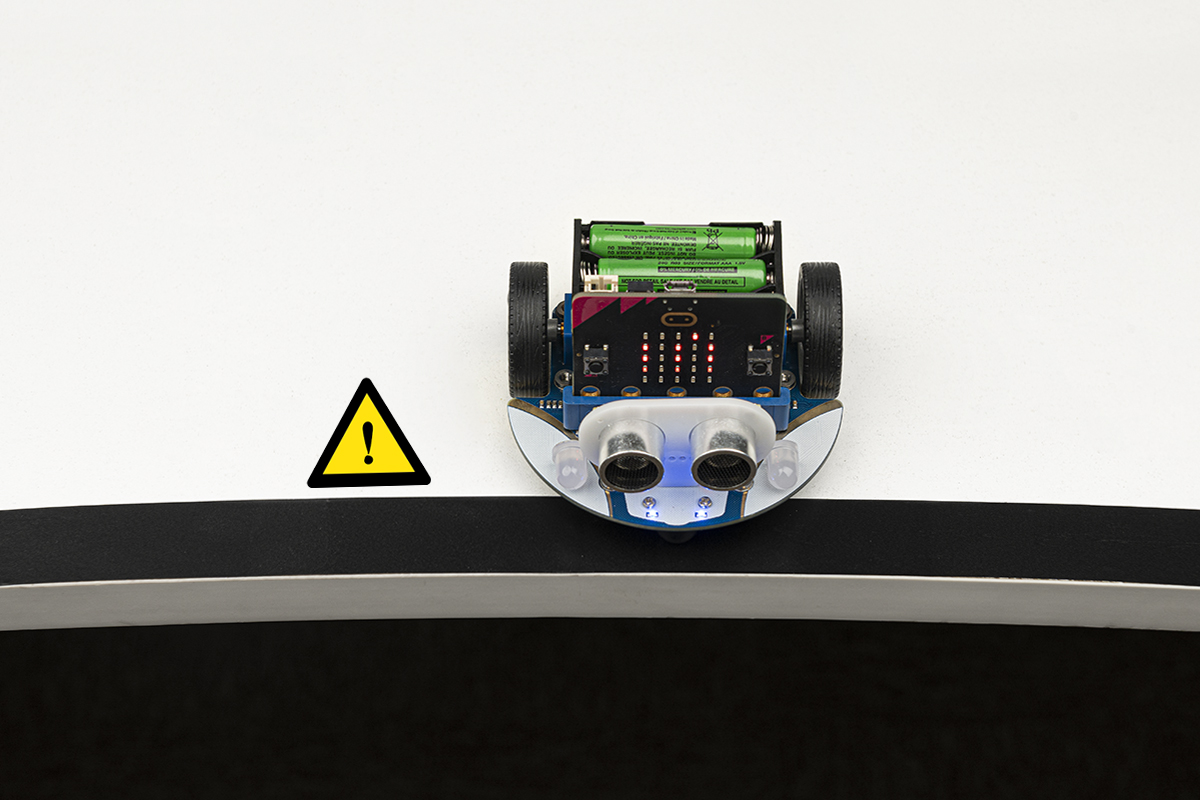
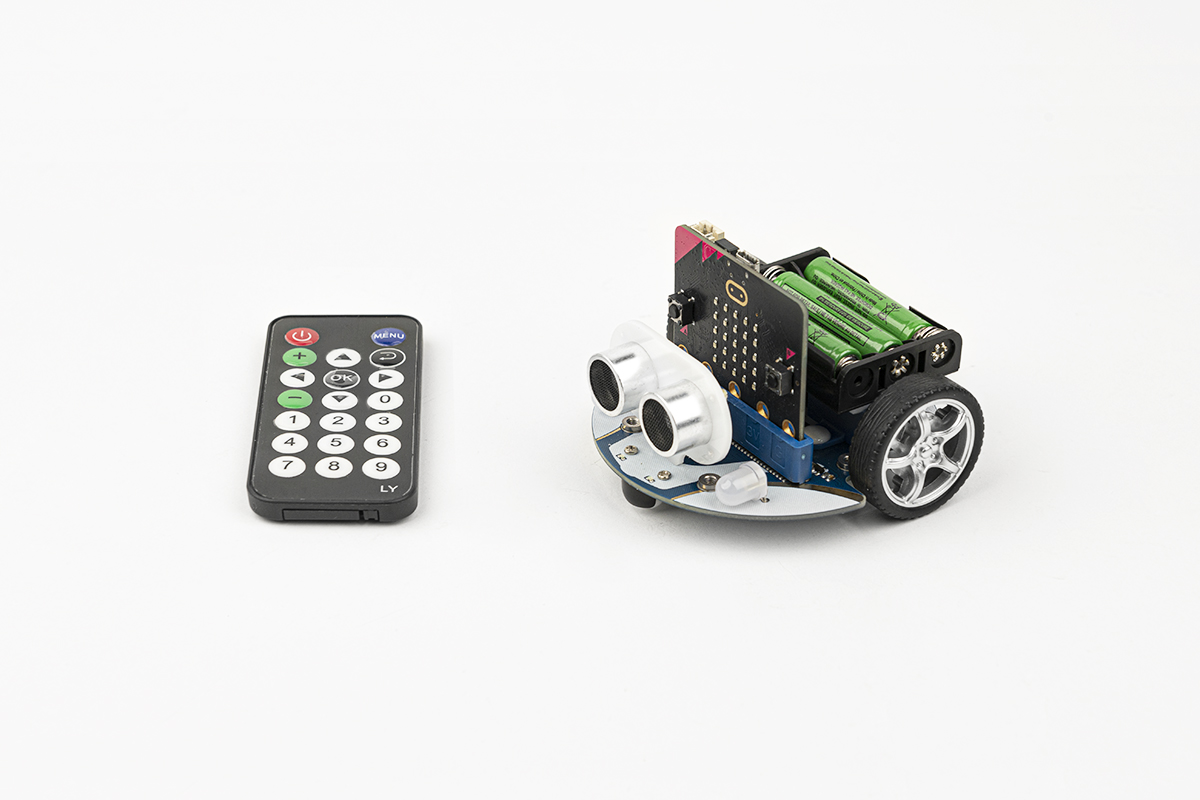
Out of the box, the Cutebot is equipped with an HC-SR04 ultrasonic sensor for contactless distance detection, dual RGB LED headlights, two Rainbow LED clearance lamps, dual line-tracking probes, an active buzzer, and an infrared receiver. All these components make the Cutebot a complete, ready-to-program robotics platform with no additional hardware required.
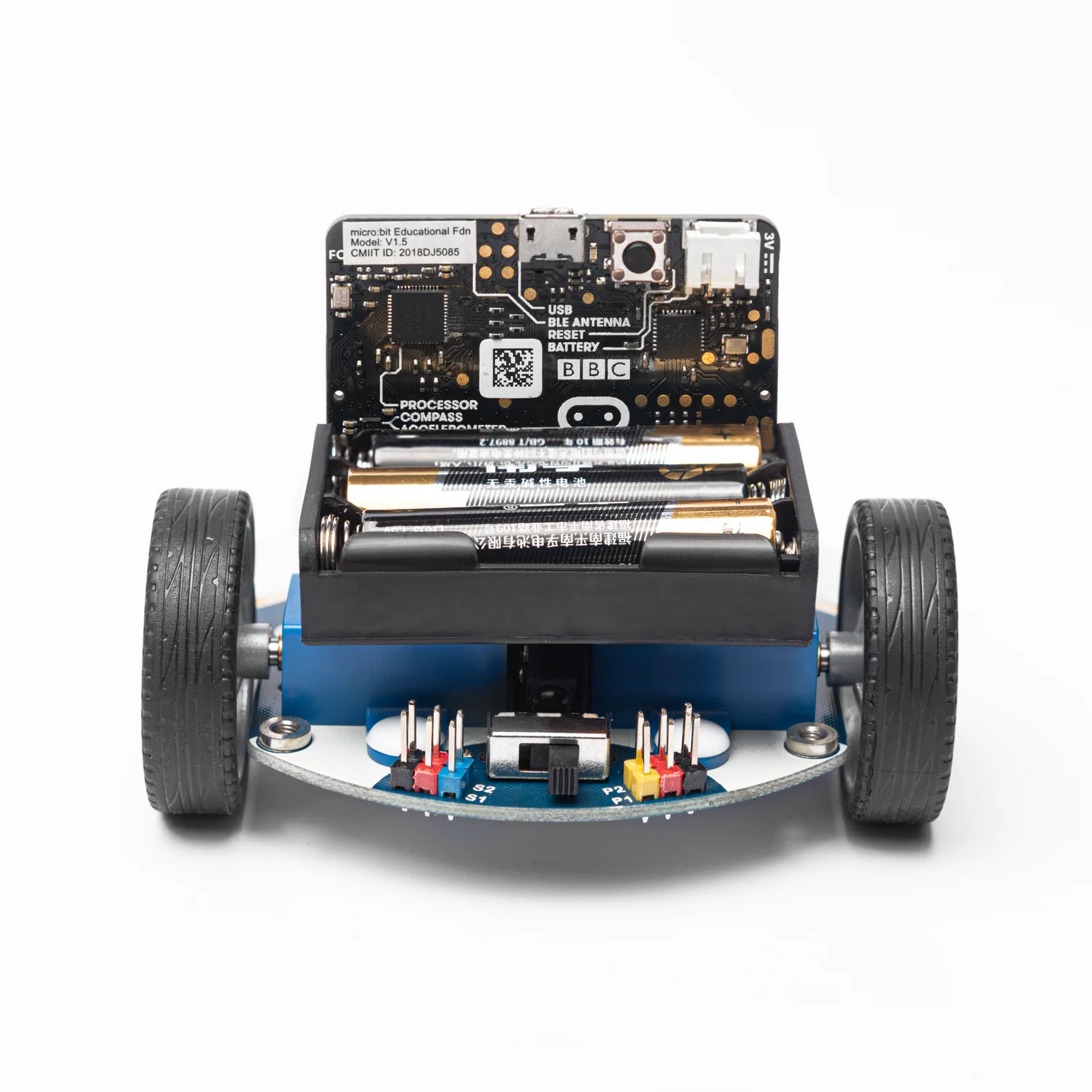
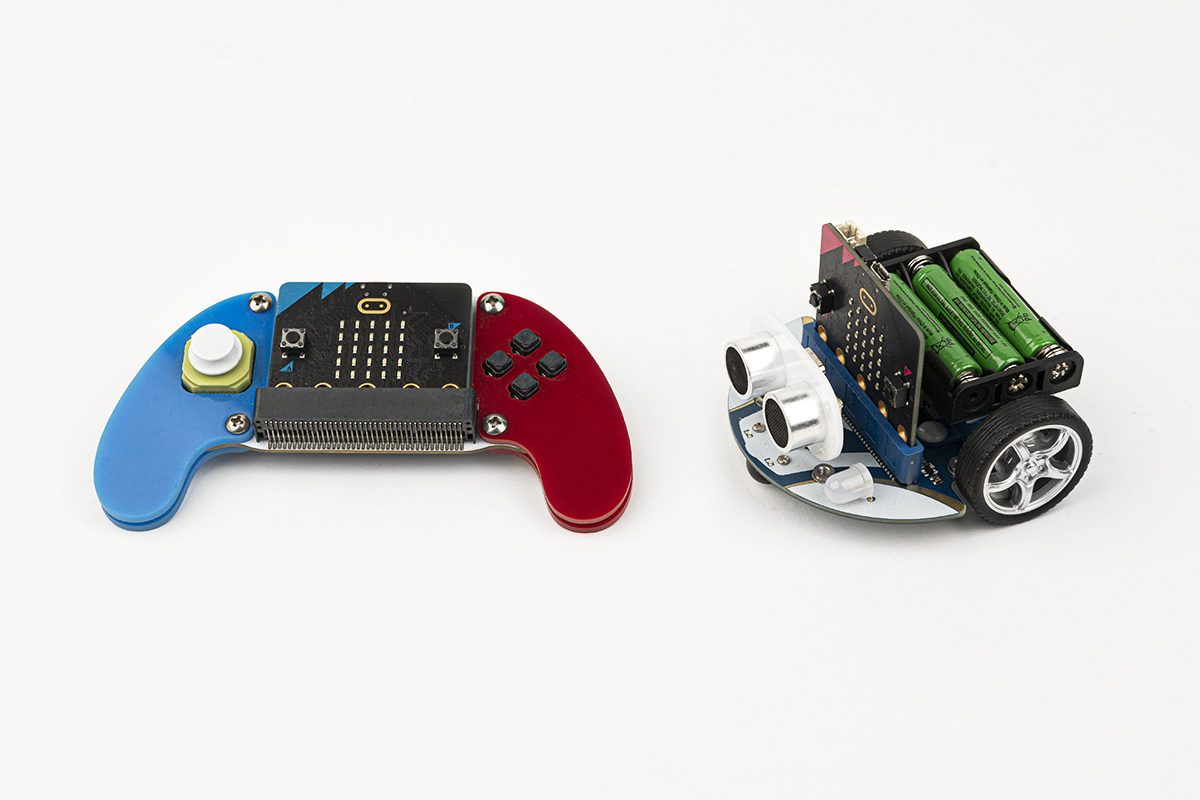
Designed for use with the BBC micro:bit, the Cutebot connects via a dedicated expansion slot and exposes IIC, servo (S1, S2), and GVS ports for further expansion. It is compatible with MakeCode, MicroPython, and JavaScript, making it accessible for students from absolute beginners to advanced coders.
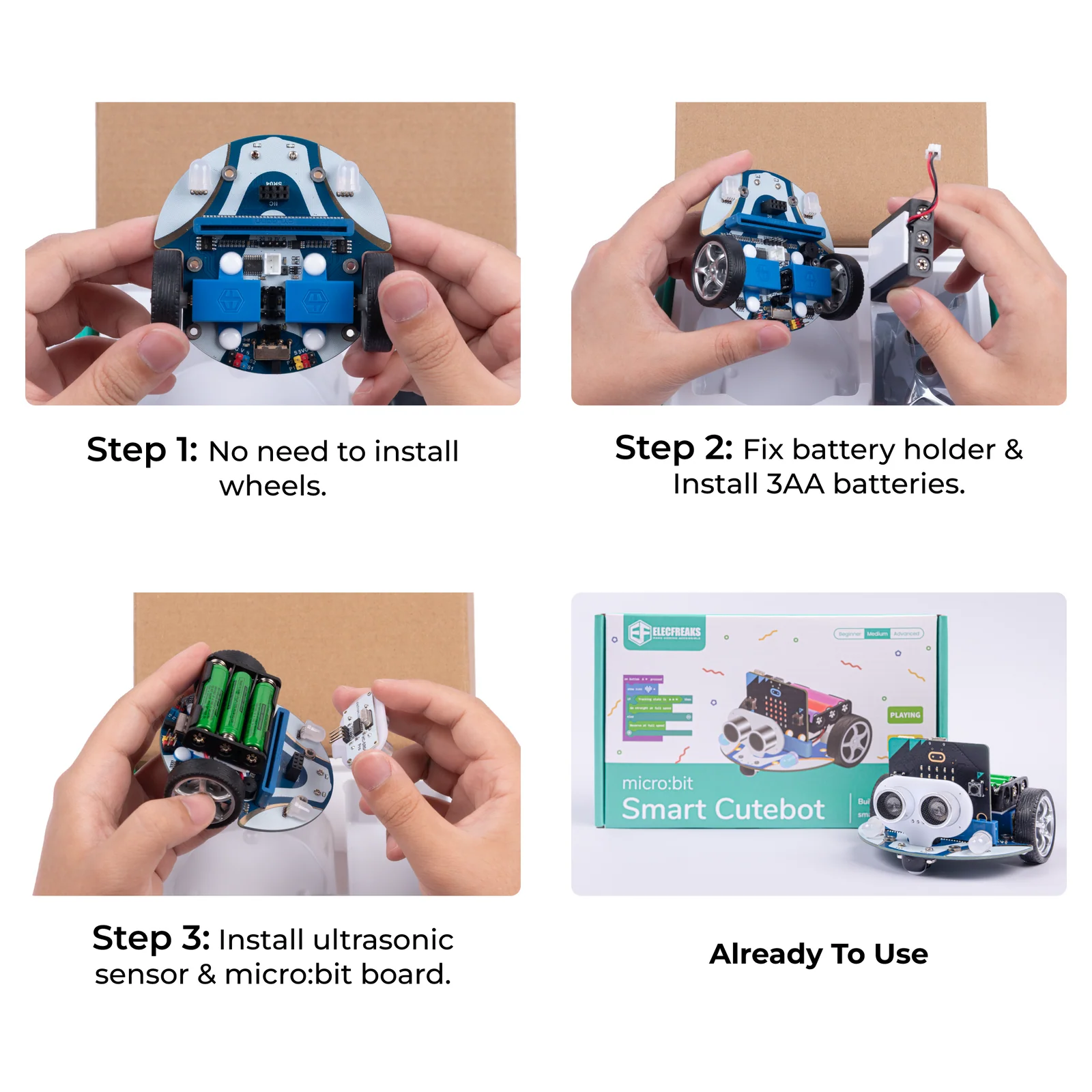
Minimal assembly required — simply install the batteries and plug in the ultrasonic sensor to start programming immediately.