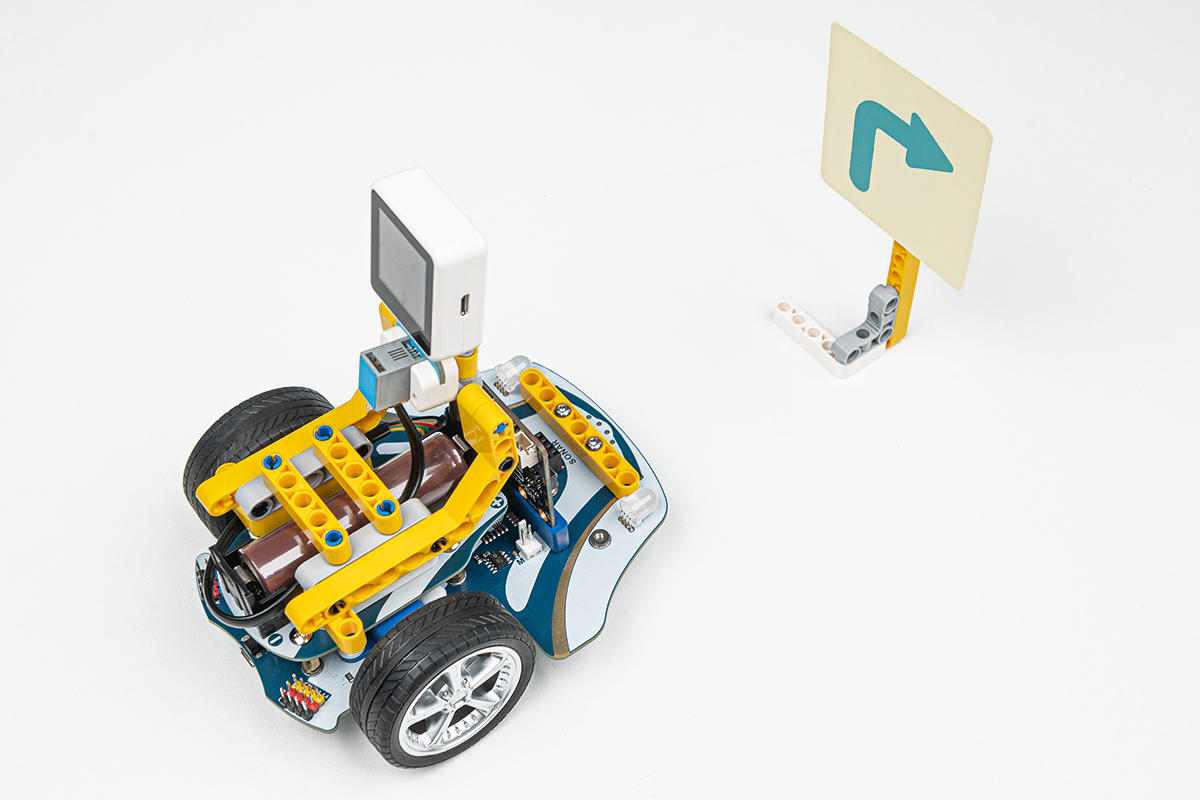
The ELECFREAKS Smart Cutebot Pro (EF08292) is an advanced STEAM education programming robot designed for students who are ready to go beyond basic robotics. Building on the original Cutebot, the Pro model upgrades the drive system with dual encoder motors — providing precise distance control and accurate turning angle adjustments for far more sophisticated programming challenges.
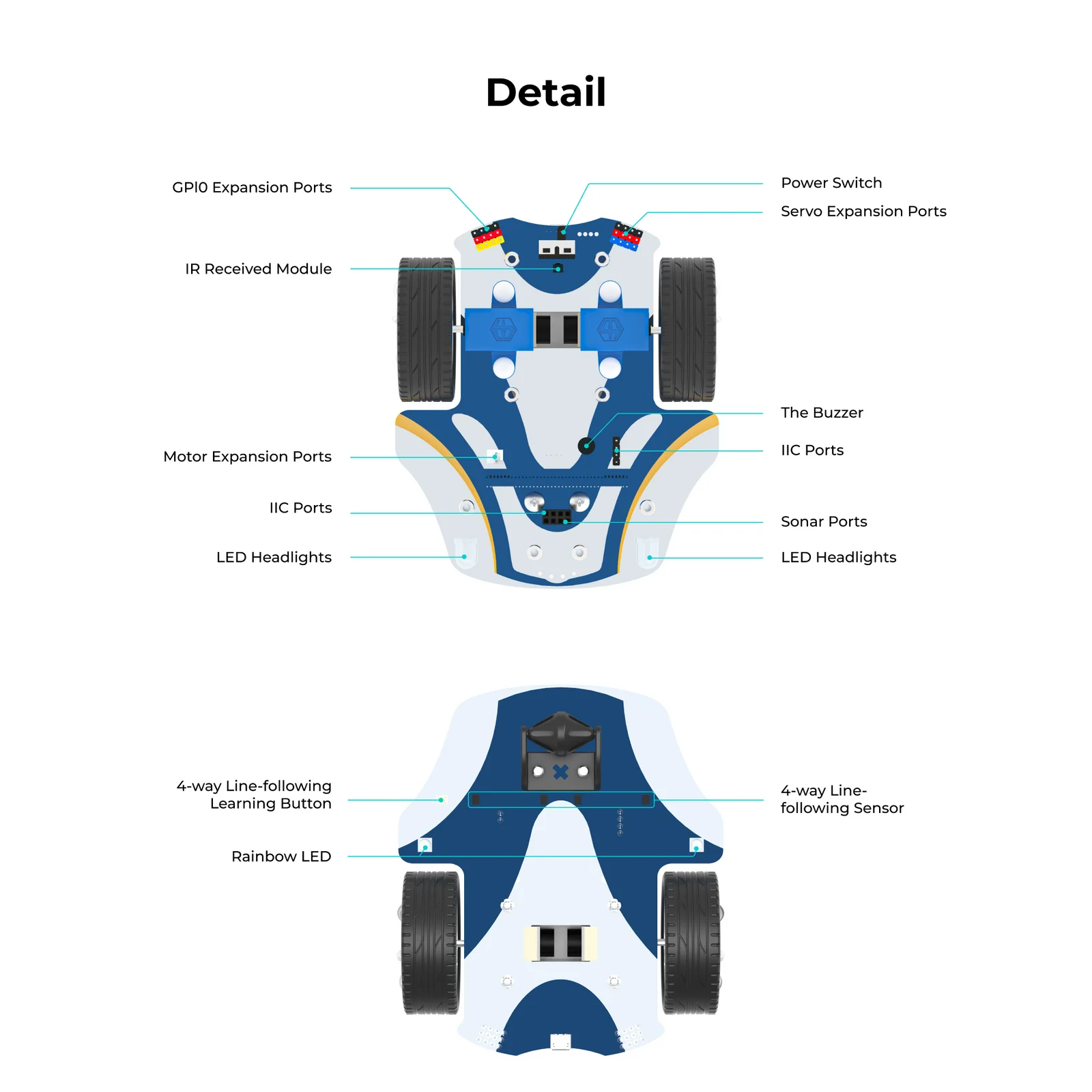
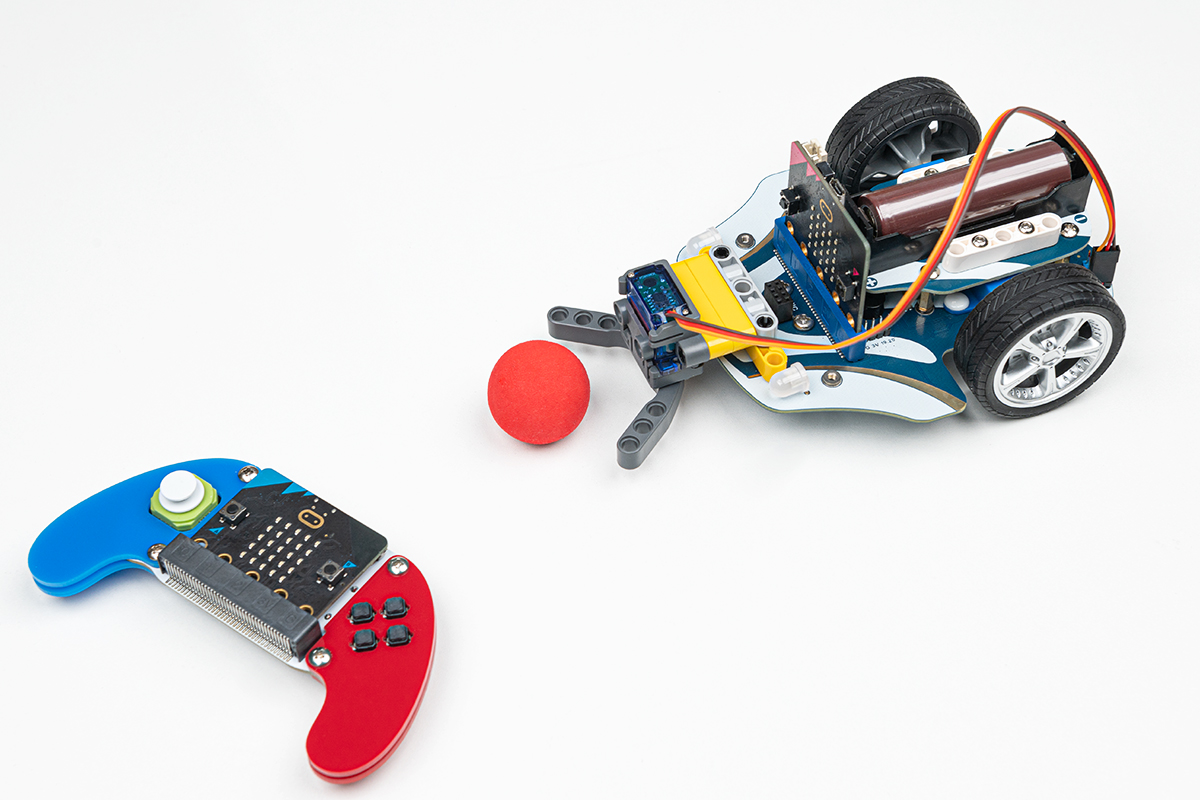
Equipped with a 4-way infrared line-following sensor for smooth autonomous navigation, an ultrasonic sensor for obstacle detection and following behaviours, Rainbow LEDs for vibrant programmable lighting, and RGB headlights for creative lighting projects, the Cutebot Pro is a complete, classroom-ready platform.
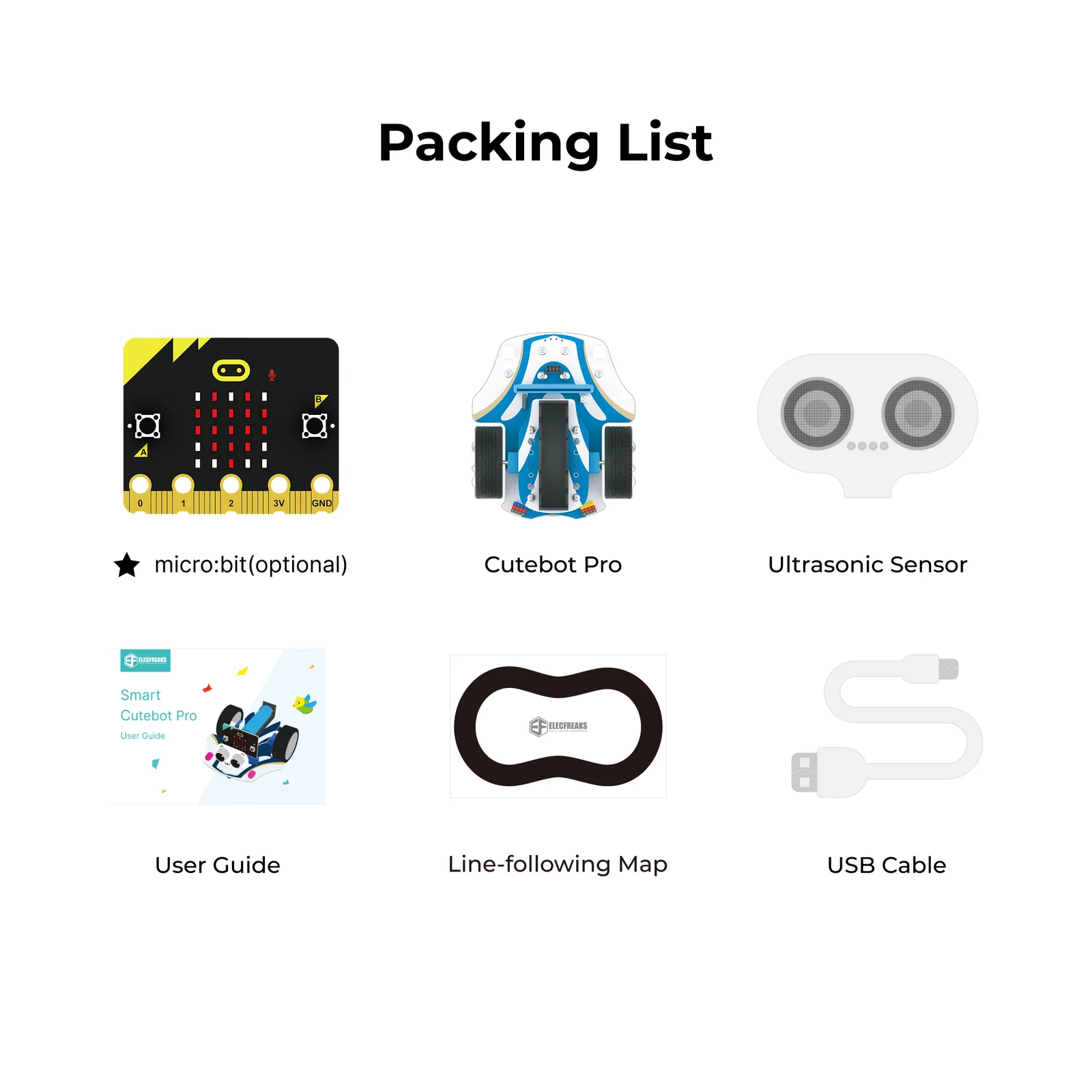
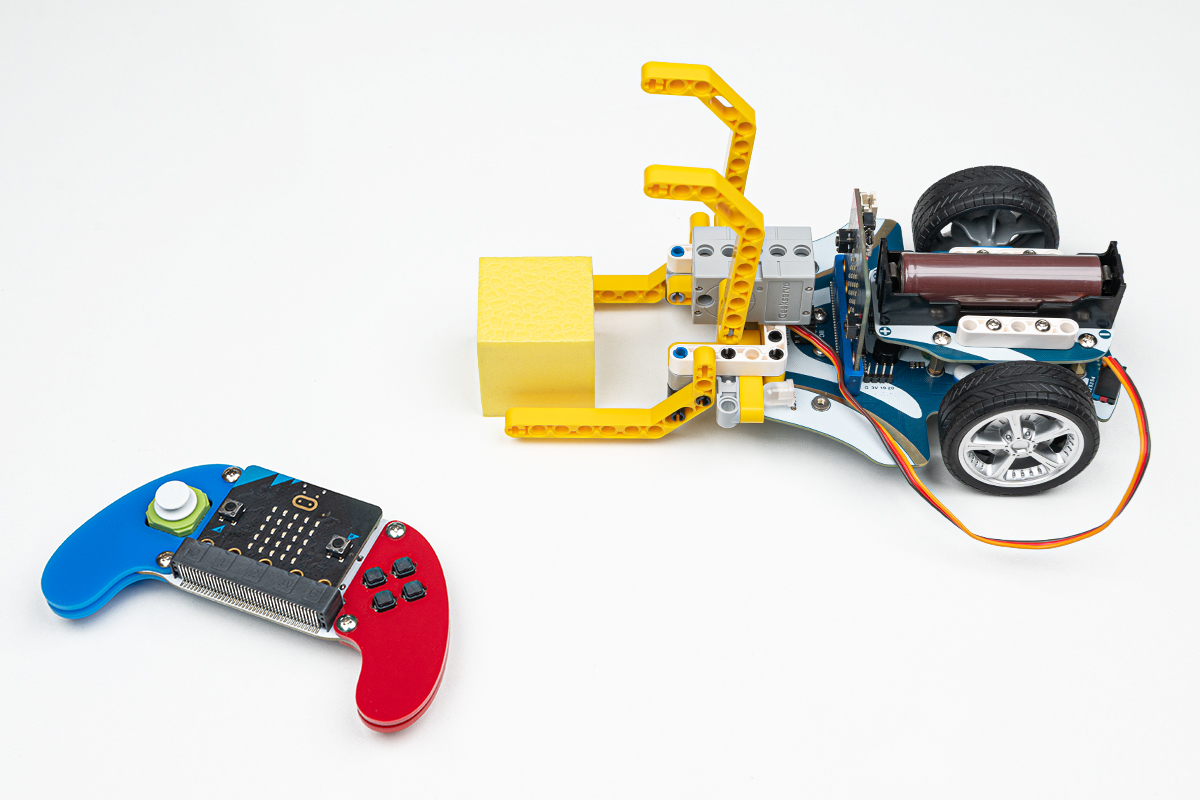
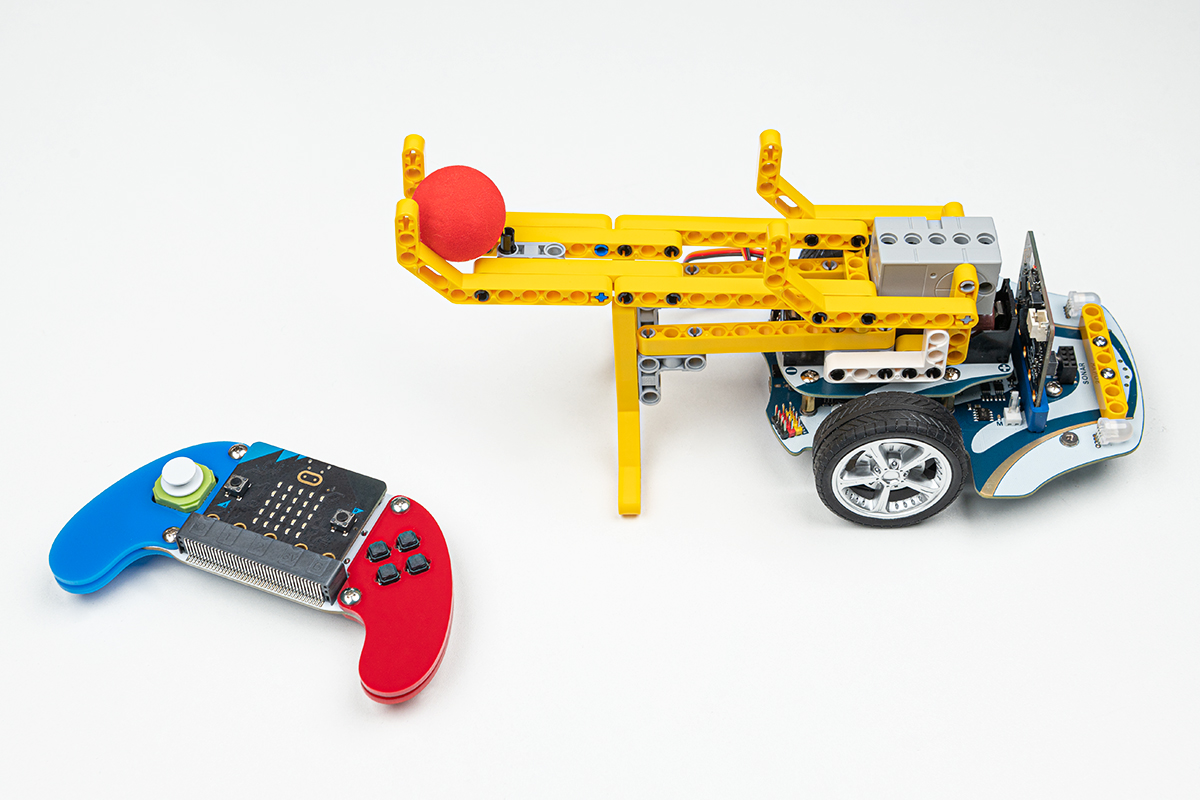
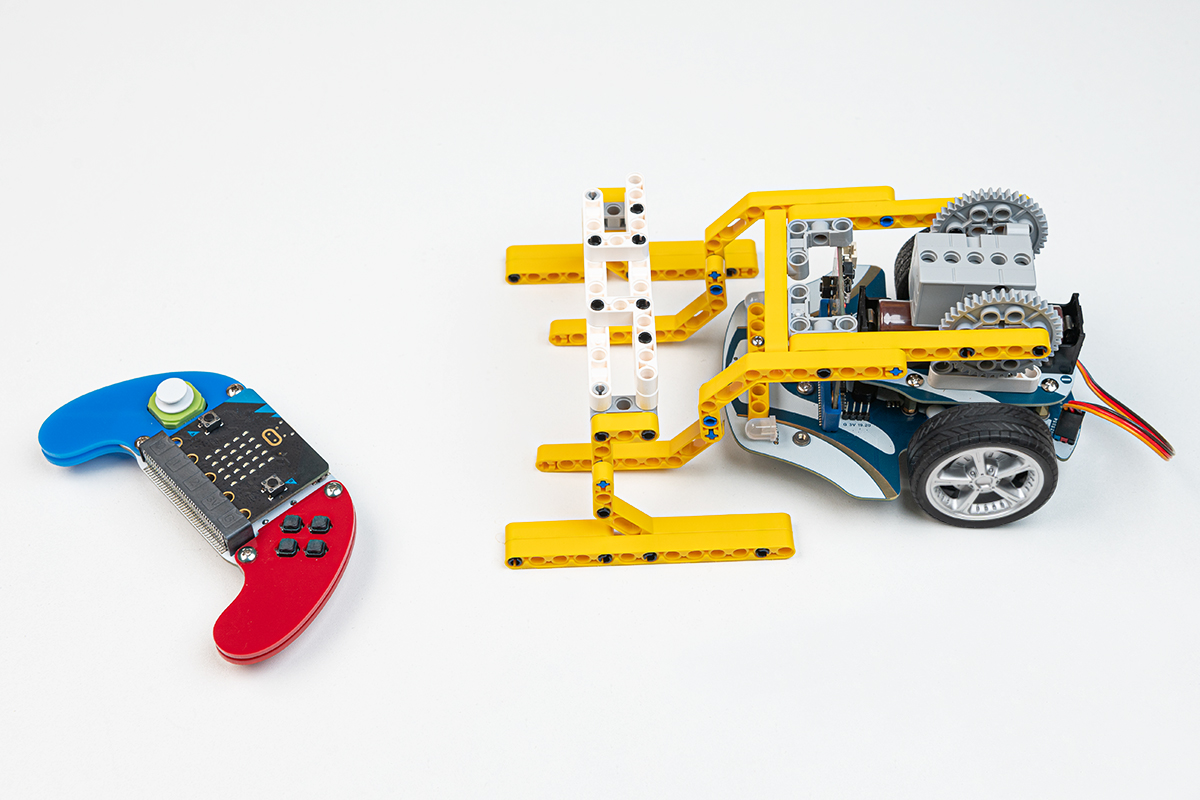
Designed to work with the BBC micro:bit, the Cutebot Pro connects via a dedicated expansion slot and offers multiple IIC, servo, motor, and GPIO expansion ports. Its brick-compatible top surface invites creative hardware extensions — stimulating imagination and engineering thinking beyond the default configuration.
Compatible with MakeCode, MicroPython, and JavaScript, and powered by an onboard 18650 lithium battery, the Cutebot Pro supports 13 progressively challenging projects that build real-world STEAM competencies from motor control to PID algorithms.