Elecfreaks · micro:bit Smart Car Series
Smart Car Kits
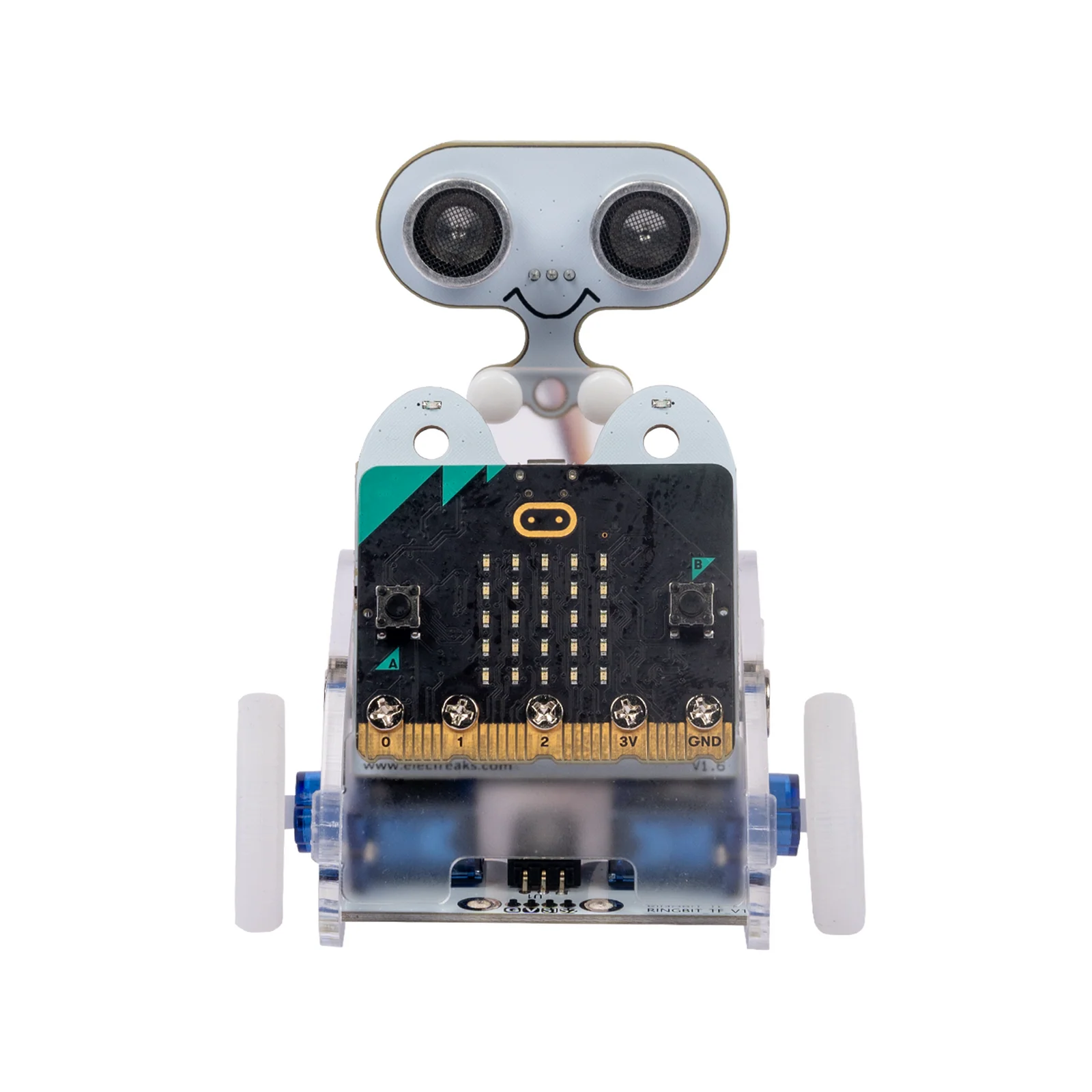
Ring:bit
Car V2
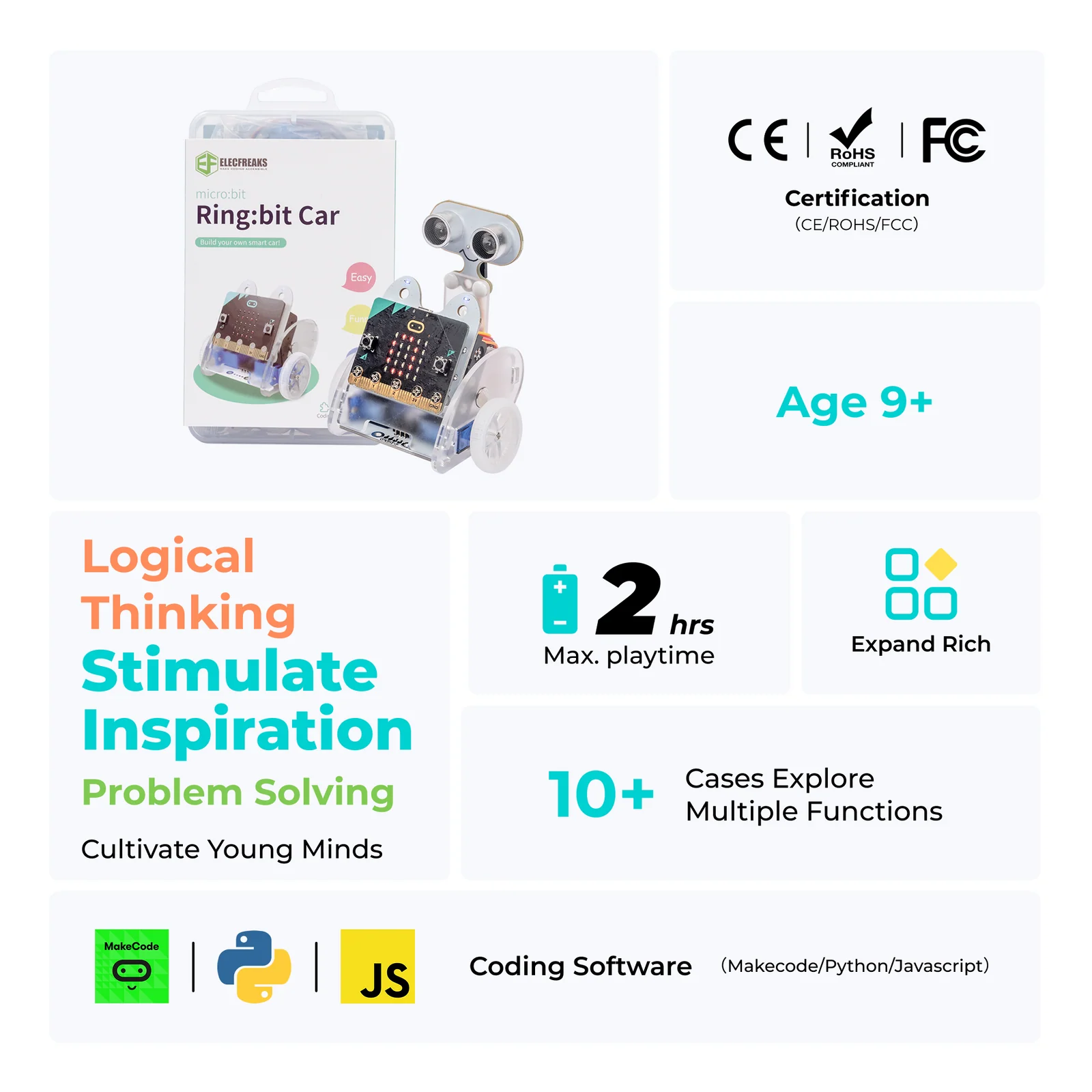
A small DIY smart car driven by the BBC micro:bit and the ELECFREAKS Ring:bit expansion board. Build it, program it, and explore robotics, wireless communication, and autonomous navigation — all in one kit.
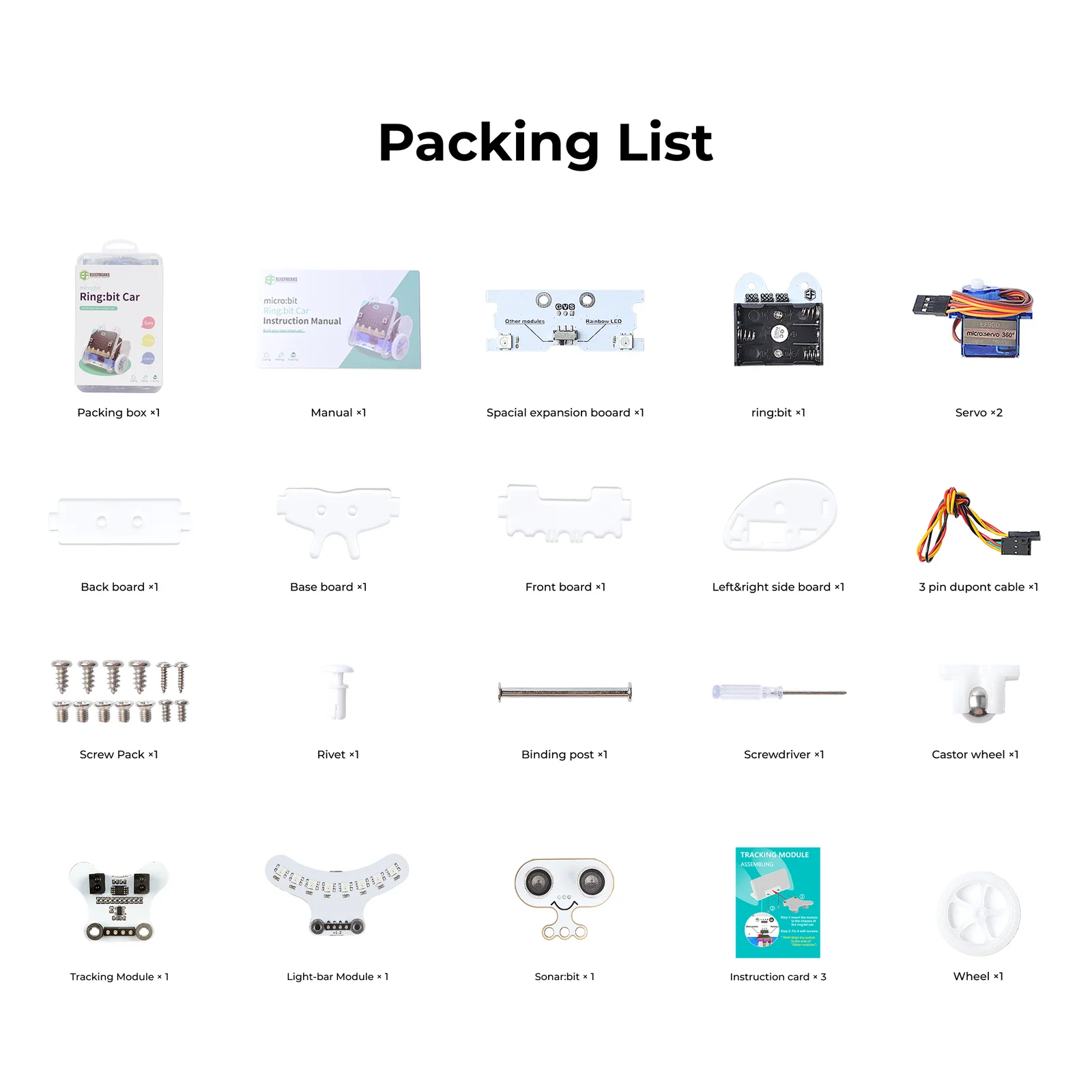
🚗 DIY Build-It-Yourself
🔌 Ring:bit Expansion Board
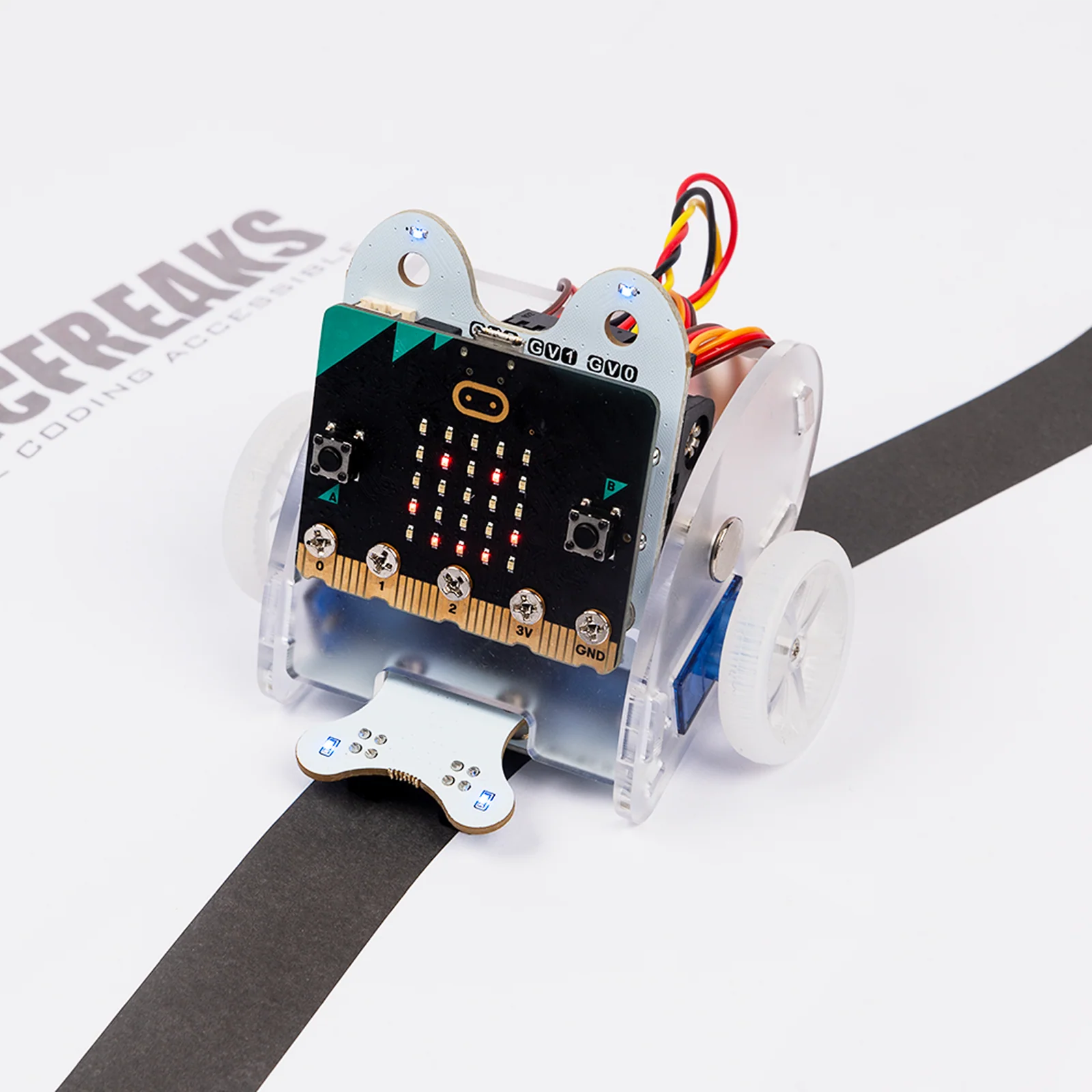
📡 Wireless Remote Control
🎓 Grades 4–10
Request a Quote →

11
Project Cases
2
360° Servos
8
RGB LEDs